In 2018 I built a corexy sand table that approximately 1m x 2m with drawable area of 715 x 1600 mm. It uses 45 mm square t-slot picked up at a local scrap yard for the frame, and as the Y axis guide rails. The X axis is a 16 mm square aluminum tube on which the magnet carriage rides. The magnet is a 1" cube neodymium N52 magnet. The sand box has a 1/2" plywood bottom (yeah, I know, too thick…).
The table started out cable driven, then went to belts and finally stacked belts. Bearing blocks, pulley blocks, and the magnet carriage are all 3D printed.
It started with NEMA-17 steppers, then went to NEMA-23 steppers, and as of two days ago, NEMA-17 servomotors. The new motors are 75W integrated motors with 1000 line encoders. iHSV42-40-07-24 parts ordered from China for about $90 each. I operate the servos at 1000 steps/rev, which translates to 31.25 steps/mm. Each motor has its own fanless 24V power supply, one rated for 150W and the other, which also powers the controller and LED lighting is rated for 200W.
Lighting is a strip of red LEDs along one long side of the table and blue LEDs along the opposite side, both set very low to maximize shadows in the grooves of the drawings. The table started with a Smoothieboard controller that was eventually replaced by a Duet WiFi board with TMC drivers that were running at 256:1 ustepping when there were steppers in the table.
I have worked hard to minimize noise from the motors and mechanism and really reduced it a lot, though there is still some work to do. The servomotors, running at reasonable speeds (500 mm/sec) and accelerations (2000 mm/sec^2), are quieter than the steppers. The steppers were always running at the edge of their performance limits in terms of speed and acceleration. The servomotors are a HUGE improvement in that regard.
Right after I installed the servos and got them working I mounted a blue LED in the magnet carriage and did some light painting:
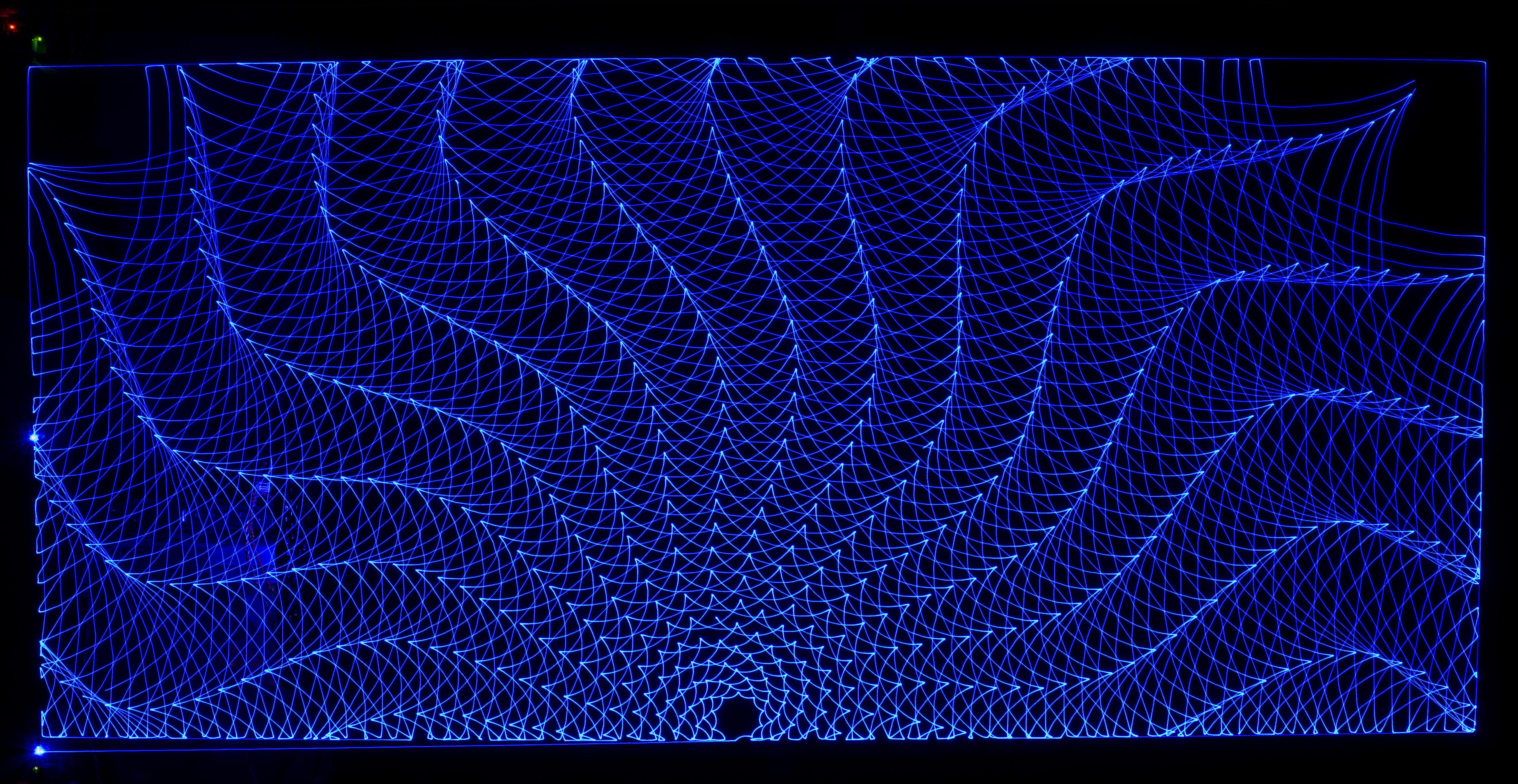
After playing with that for a little while I put the sandbox back on the table and tried running some patterns, and then started pushing up the speed and acceleration to test the limits of the servomotors. Video here: https://vimeo.com/423704831
Nope, that’s not sped up video. That’s real time, 20,000 mm/sec^2 acceleration, 200 mm/sec jerk speed, and 1500 mm/sec drawing speed which it is hitting on every segment it is drawing. I have some tweaks to do in the controller firmware, then I will try pushing it even harder to see where it breaks. I expect the magnet to lose the ball before the motors give out.
I am amazed that the magnet is able to keep the ball under control at the speeds and accelerations seen in the video.


 That looks great.
That looks great.

