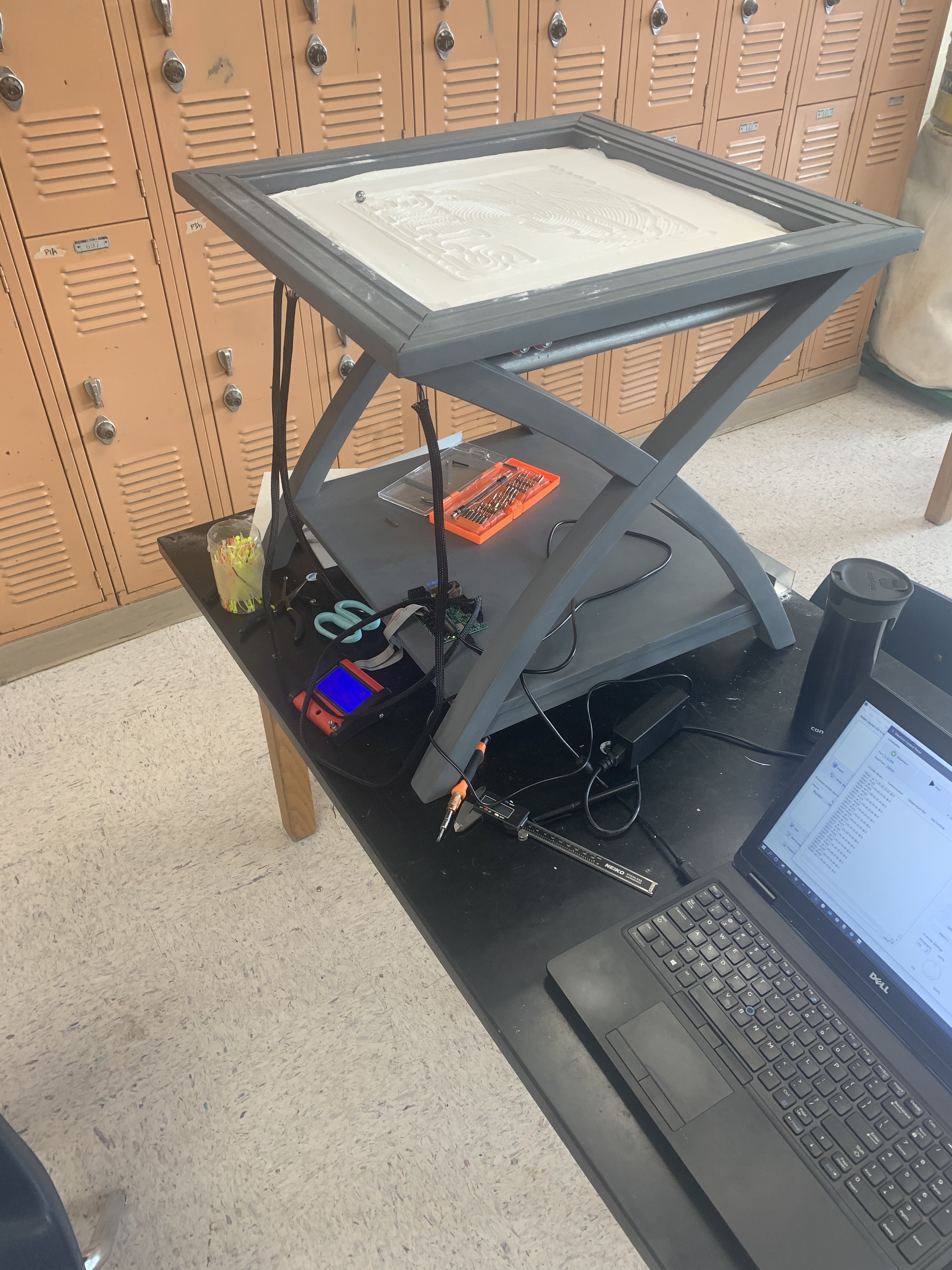
Chris, Here are my current GRBL settings on my ZenXY table.
$0 = 10 (Step pulse time, microseconds)
$1 = 25 (Step idle delay, milliseconds)
$2 = 0 (Step pulse invert, mask)
$3 = 0 (Step direction invert, mask)
$4 = 0 (Invert step enable pin, boolean)
$5 = 0 (Invert limit pins, boolean)
$6 = 0 (Invert probe pin, boolean)
$10 = 0 (Status report options, mask)
$11 = 0.010 (Junction deviation, millimeters)
$12 = 0.002 (Arc tolerance, millimeters)
$13 = 0 (Report in inches, boolean)
$20 = 0 (Soft limits enable, boolean)
$21 = 0 (Hard limits enable, boolean)
$22 = 1 (Homing cycle enable, boolean)
$23 = 3 (Homing direction invert, mask)
$24 = 100.000 (Homing locate feed rate, mm/min)
$25 = 2000.000 (Homing search seek rate, mm/min)
$26 = 250 (Homing switch debounce delay, milliseconds)
$27 = 2.000 (Homing switch pull-off distance, millimeters)
$30 = 1000 (Maximum spindle speed, RPM)
$31 = 0 (Minimum spindle speed, RPM)
$32 = 1 (Laser-mode enable, boolean)
$100 = 100.000 (X-axis travel resolution, step/mm)
$101 = 100.000 (Y-axis travel resolution, step/mm)
$102 = 100.000 (Z-axis travel resolution, step/mm)
$110 = 4000.000 (X-axis maximum rate, mm/min)
$111 = 4000.000 (Y-axis maximum rate, mm/min)
$112 = 500.000 (Z-axis maximum rate, mm/min)
$120 = 2000.000 (X-axis acceleration, mm/sec^2)
$121 = 2000.000 (Y-axis acceleration, mm/sec^2)
$122 = 800.000 (Z-axis acceleration, mm/sec^2)
$130 = 280.000 (X-axis maximum travel, millimeters)
$131 = 620.000 (Y-axis maximum travel, millimeters)
$132 = 200.000 (Z-axis maximum travel, millimeters)
I am using TMC2208 drivers in standalone/legacy mode using 16 micro-stepping.
You will want to change the $130 and $131 to reflect your table’s work area. You might also want to change the $110 and $111 to something slower. I only have those high for testing. If I’m not mistaken, when doing jogs, it will use the max feed-rate. But then again, I have puny 39oz/in motors on mine. 
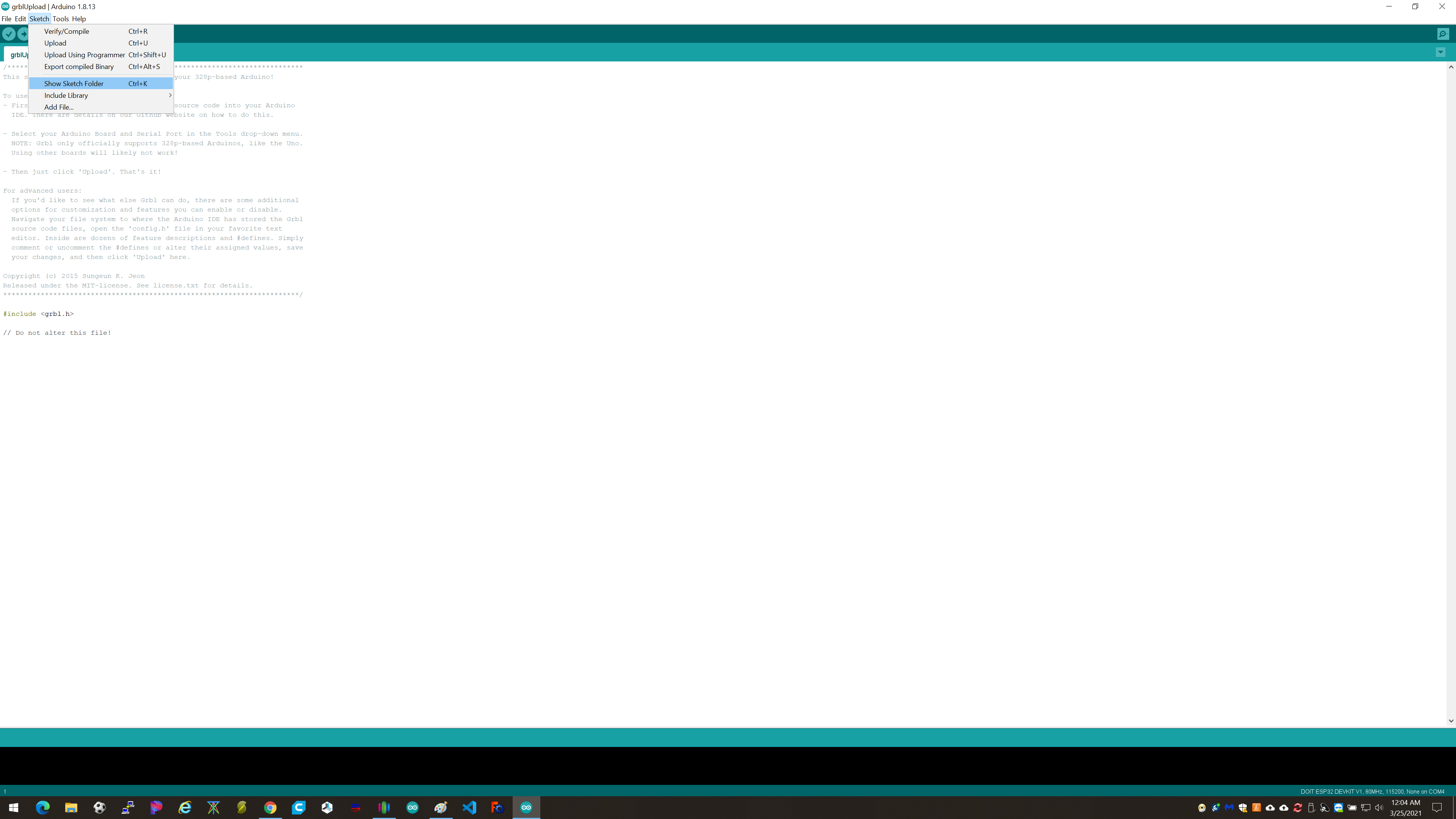
Also, when you jog the axis, do both motors move, or just one? If only one is moving it would seem like the COREXY Kinematics aren’t enabled. I know I’ve run into issues where I’m changing the config.h file in the wrong folder because when I added the library or project to the Arduino IDE, it makes a copy in a different folder and that’s the one you need to change. I thought I was going crazy a few times. You can make sure you are in the right folder by going to Sketch>Show Sketch Folder.
Then you will have to go “up” a couple directories to get to the containing grbl folder with the config.h.



 .
.