Hello everyone, I am here new and I want help with the software I am using ramps 1.4 adreno mega 2560 with driver A4988 , so I want to know How to configure Marlin for dual Z and dual X axis , with dual Z Dual Endstops and make it home/up, and x Dual Endstops , but I want to know if what I have done is correct in terms of changes.
change drv8825 to a4988 …Configuration…
#define X_DRIVER_TYPE A4988
#define Y_DRIVER_TYPE A4988
#define Z_DRIVER_TYPE A4988
#define X2_DRIVER_TYPE A4988
#define Z2_DRIVER_TYPE A4988
#define E0_DRIVER_TYPE A4988
#define E1_DRIVER_TYPE A4988
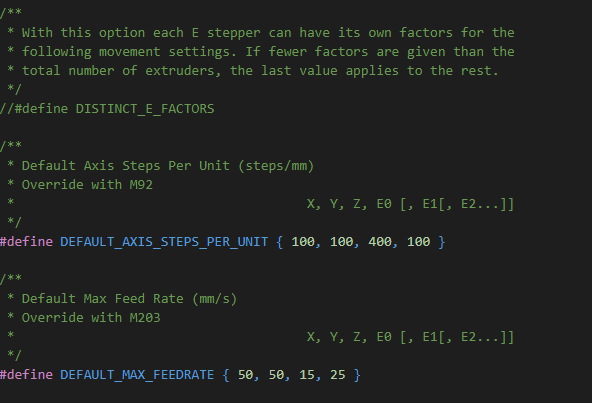
And for that I changed from 1/32 to 1/16 …Configuration…
#define DEFAULT_AXIS_STEPS_PER_UNIT { 100, 100, 400, 100 }
And also those orders from 32 to 16 like this …Configuration_adv…
#if HAS_DRIVER(TMC26X)
#if AXIS_DRIVER_TYPE_X(TMC26X)
#define X_MAX_CURRENT 1000 // (mA)
#define X_SENSE_RESISTOR 91 // (mOhms)
#define X_MICROSTEPS 16
#endif
#if AXIS_DRIVER_TYPE_X2(TMC26X)
#define X2_MAX_CURRENT 1000
#define X2_SENSE_RESISTOR 91
#define X2_MICROSTEPS 16
#endif
#if AXIS_DRIVER_TYPE_Y(TMC26X)
#define Y_MAX_CURRENT 1000
#define Y_SENSE_RESISTOR 91
#define Y_MICROSTEPS 16
#endif
#if AXIS_DRIVER_TYPE_Y2(TMC26X)
#define Y2_MAX_CURRENT 1000
#define Y2_SENSE_RESISTOR 91
#define Y2_MICROSTEPS 16
#endif
…and more …
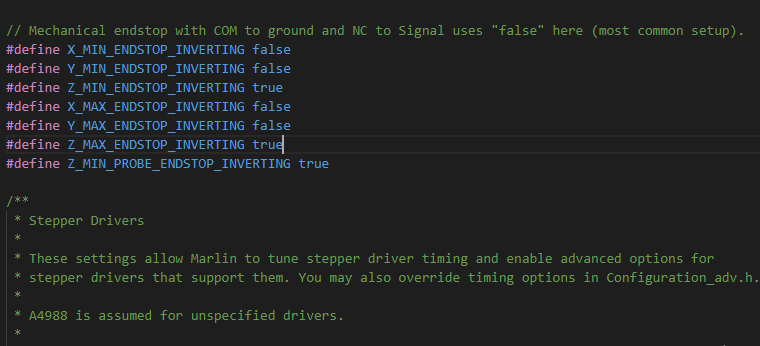
FOR Dual Endstops and make it home/up …Configuration…
#define X_MIN_ENDSTOP_INVERTING false
#define Y_MIN_ENDSTOP_INVERTING false
#define Z_MIN_ENDSTOP_INVERTING true
#define X_MAX_ENDSTOP_INVERTING false
#define Y_MAX_ENDSTOP_INVERTING false
#define Z_MAX_ENDSTOP_INVERTING true
#define Z_MIN_PROBE_ENDSTOP_INVERTING true
Also, some orders I do not mention.