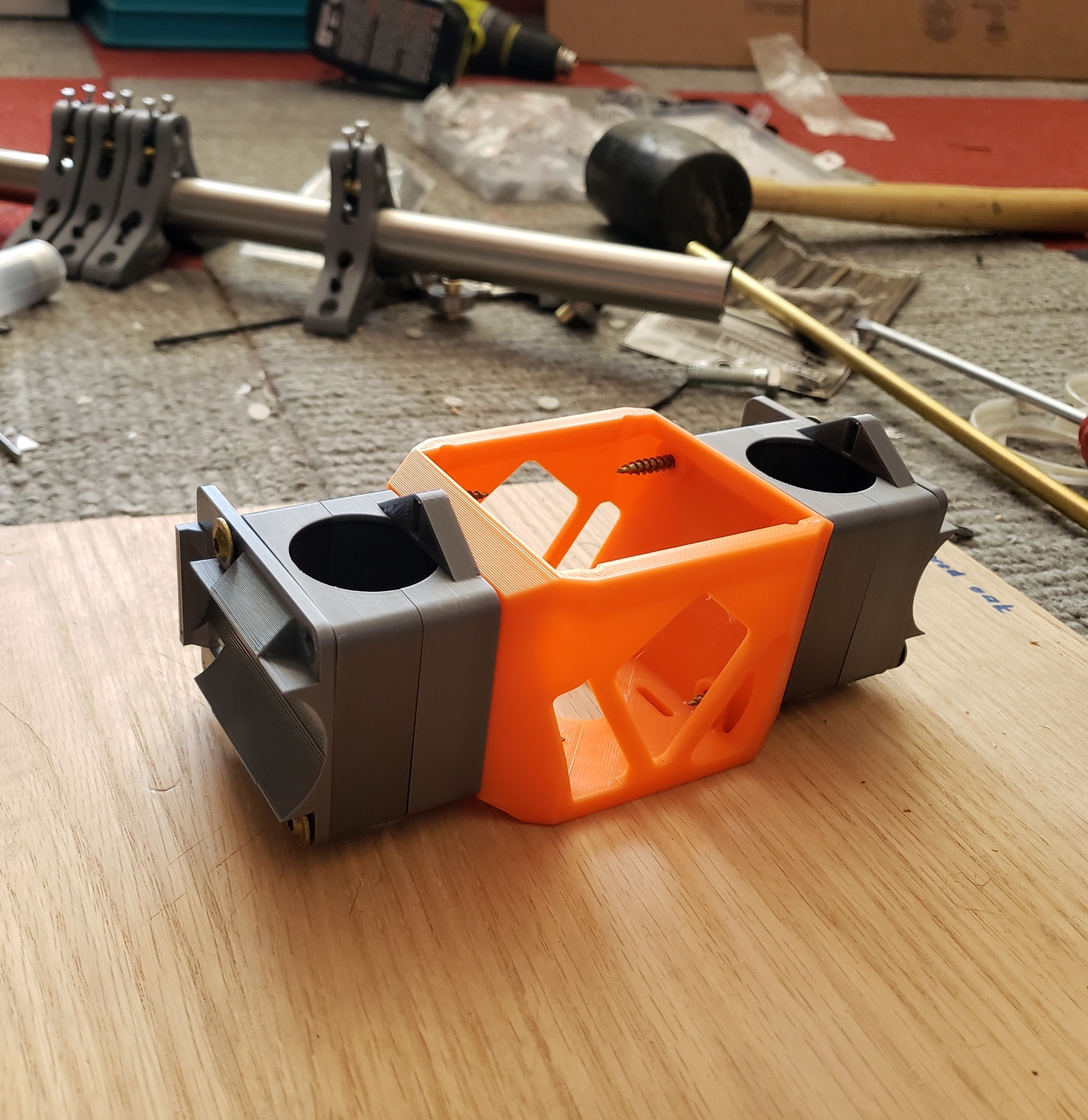
TLDR; Almost ready to print, still struggling with how to resolve hardware length. Made some steps to move from modular to adjustable.
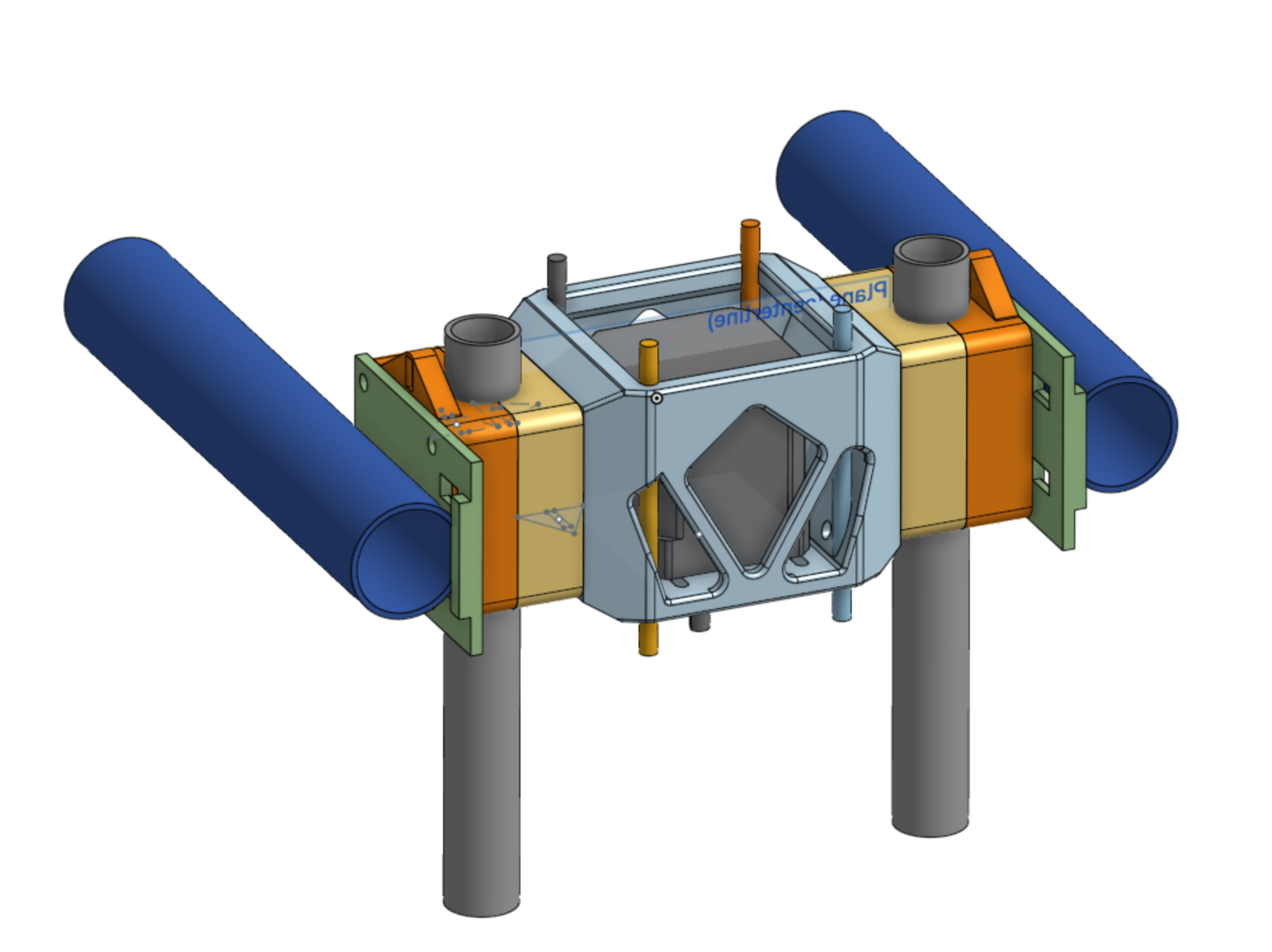
Progress
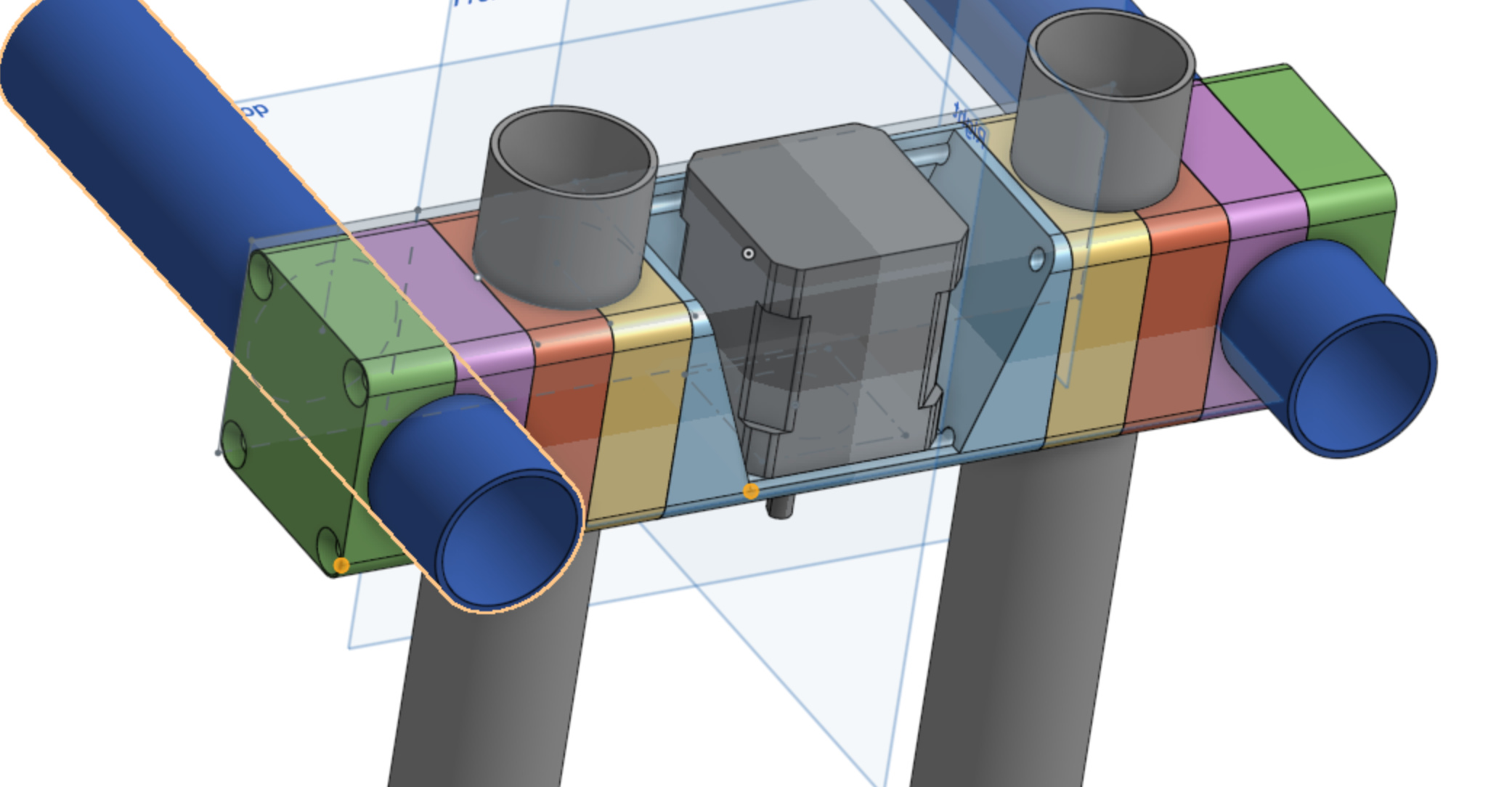
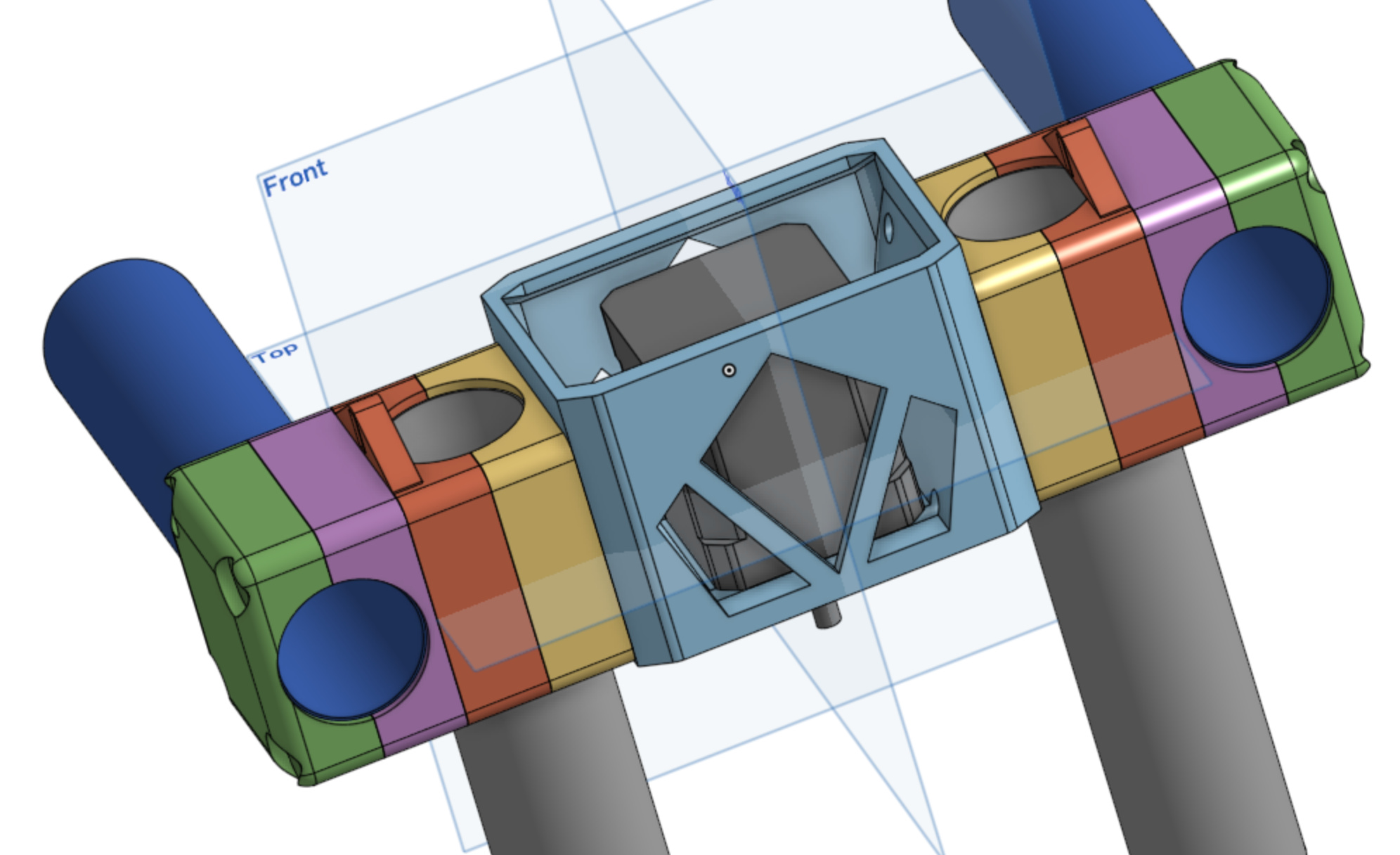
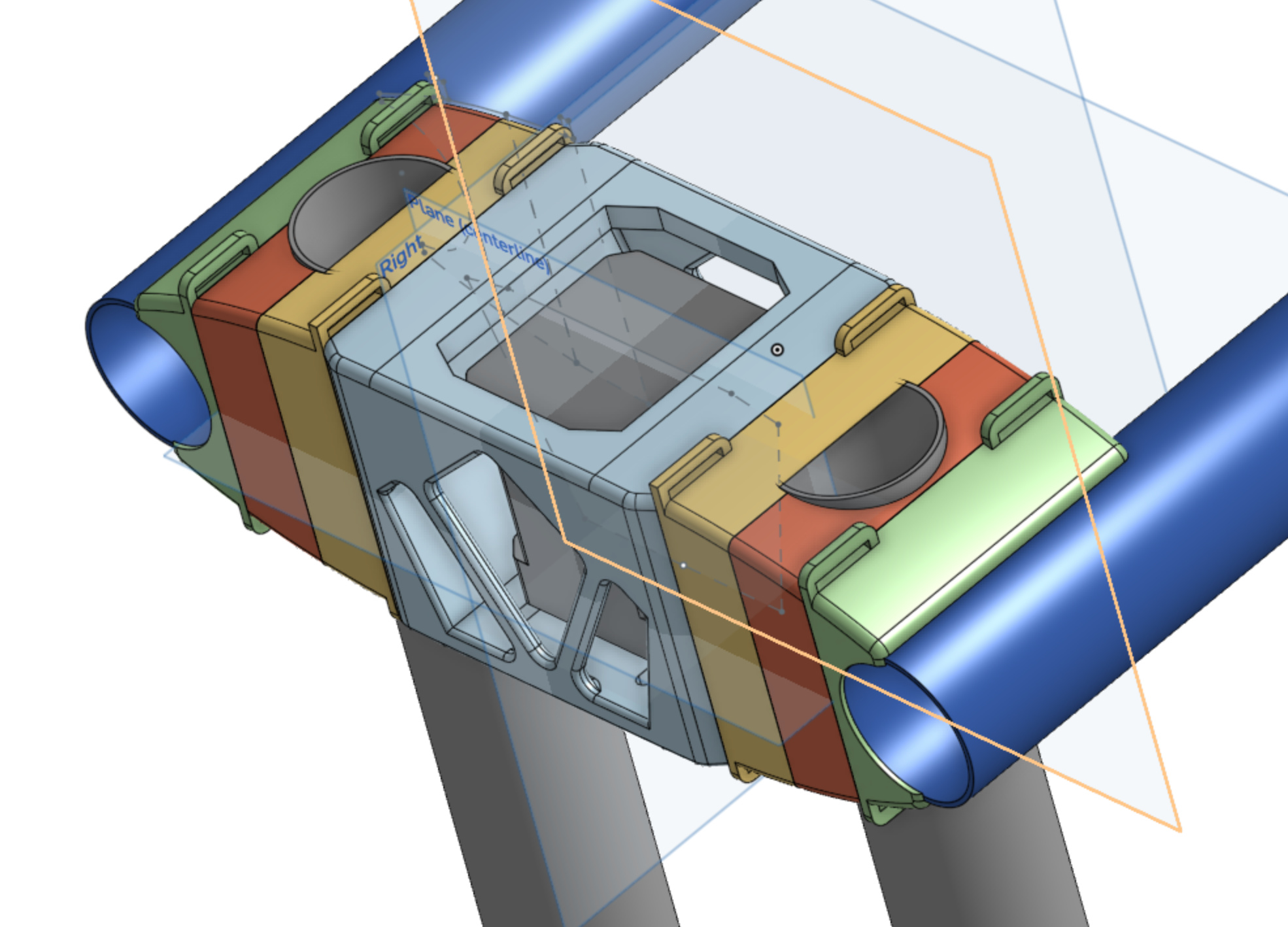
I updated the design with some features which help with adjustability:
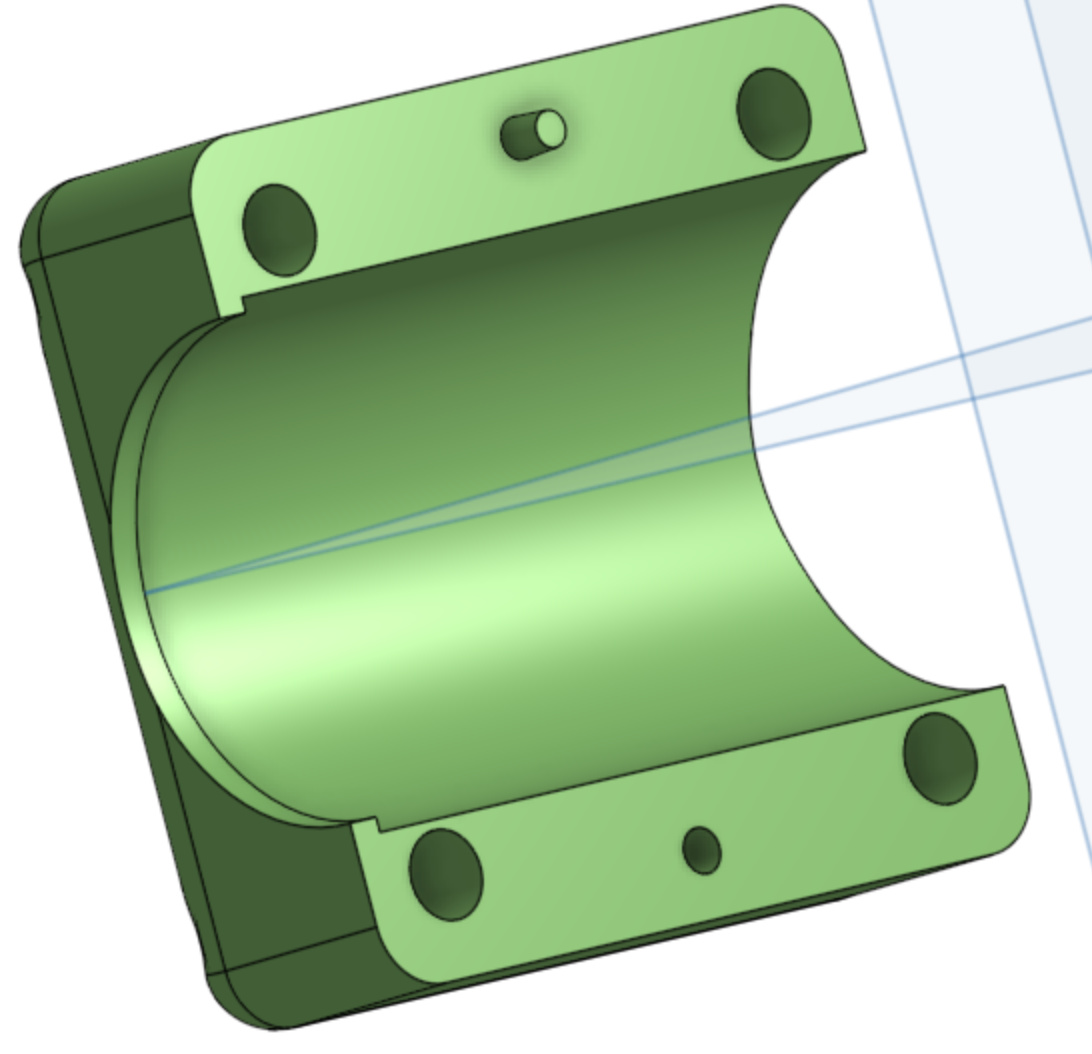
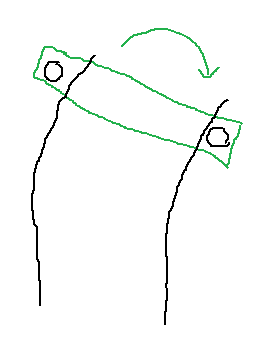
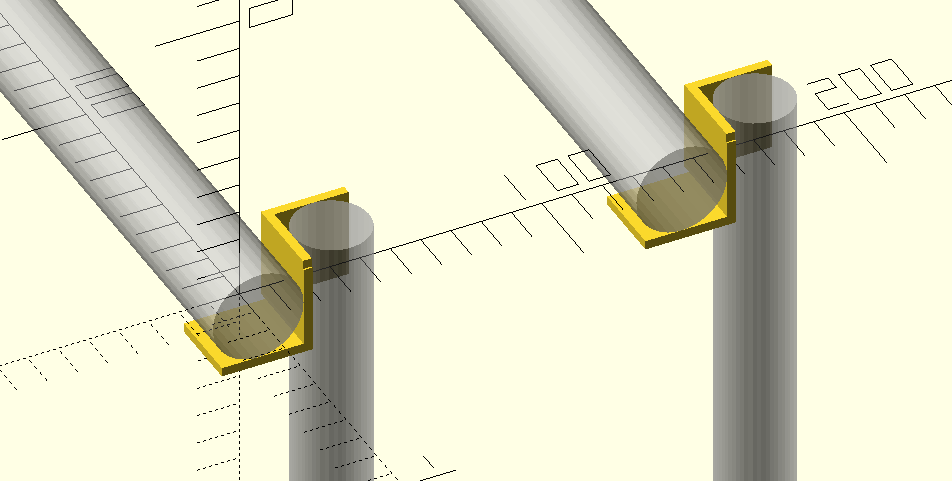
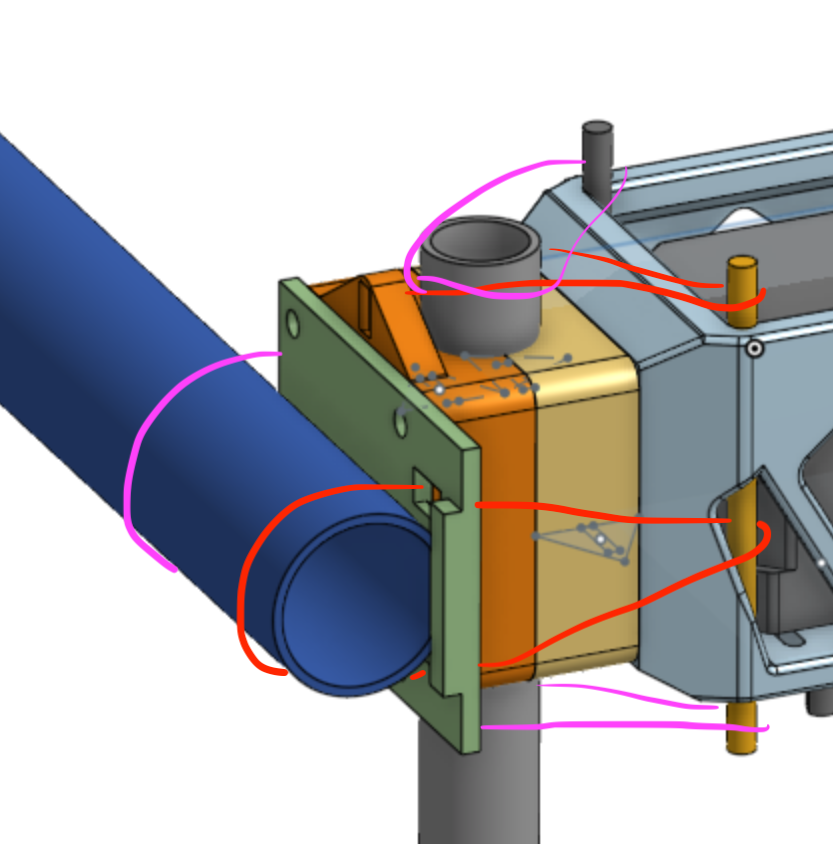
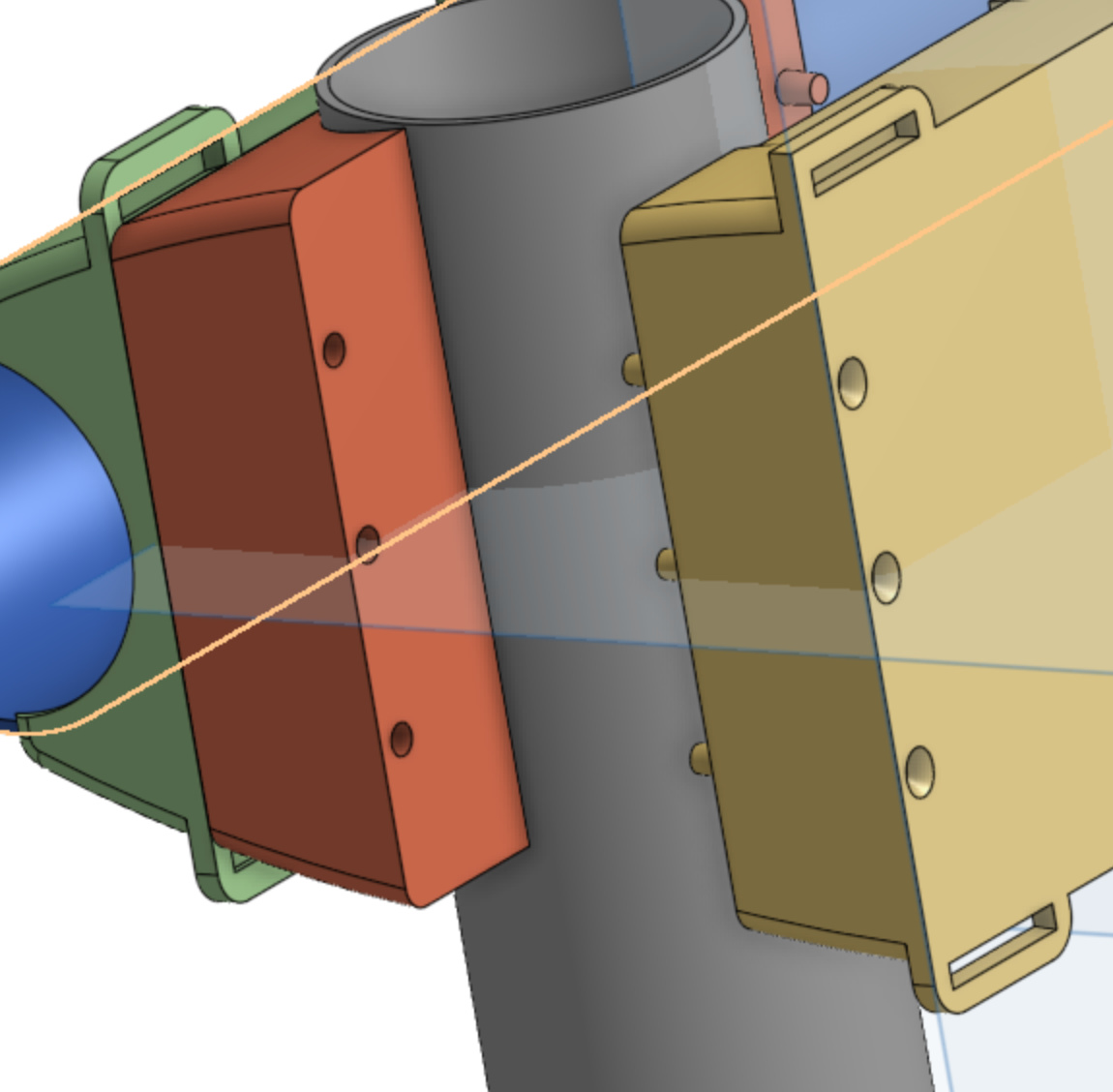
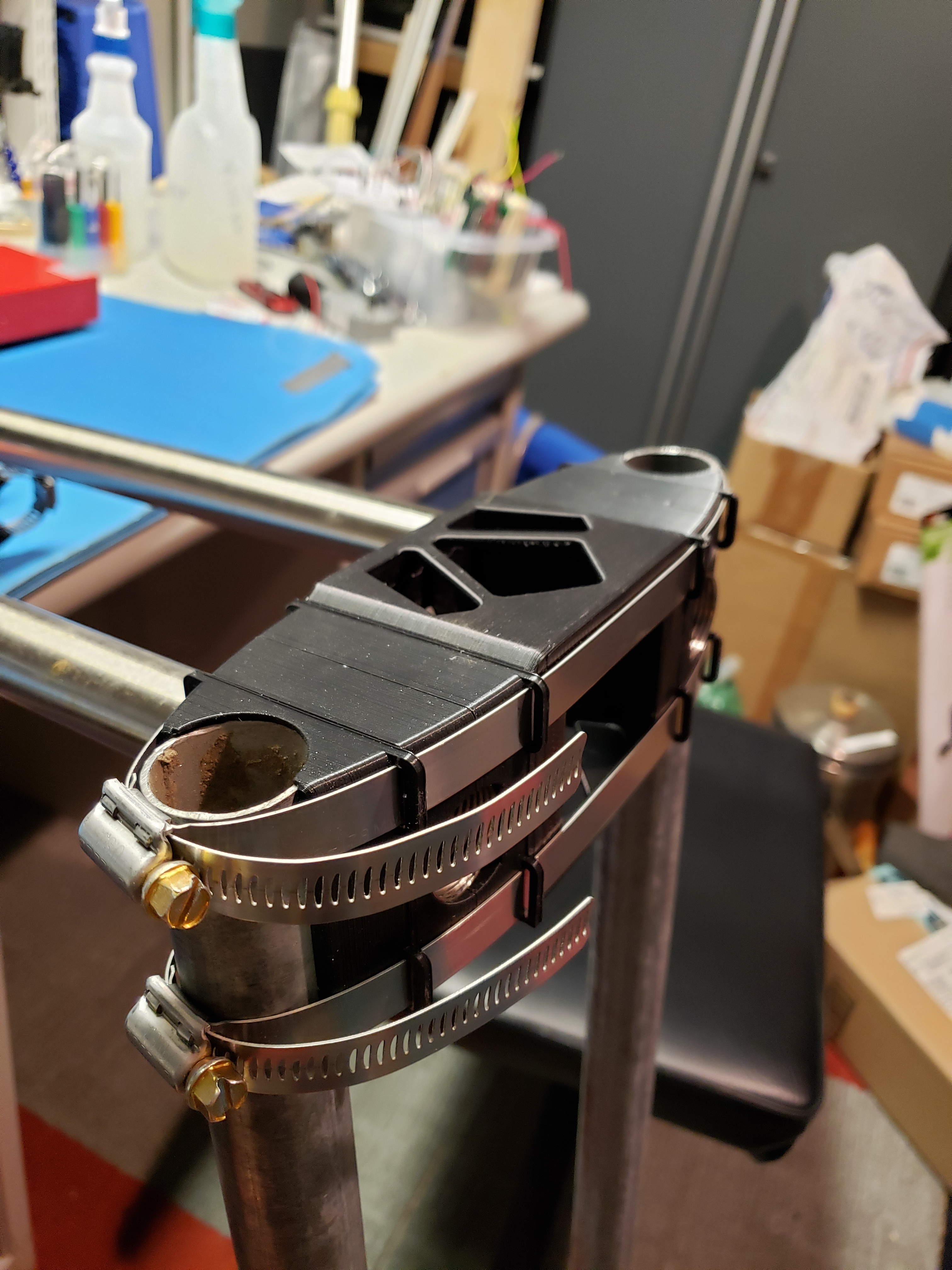
Tube clamps
I made a 0.1mm interference fit to help grab the tubes. I have no idea if this is enough or too much. In another post, @vicious1 mentioned that there is a 0.2mm tolerance on tube dia. This sounds like a very bad worst case scenario.
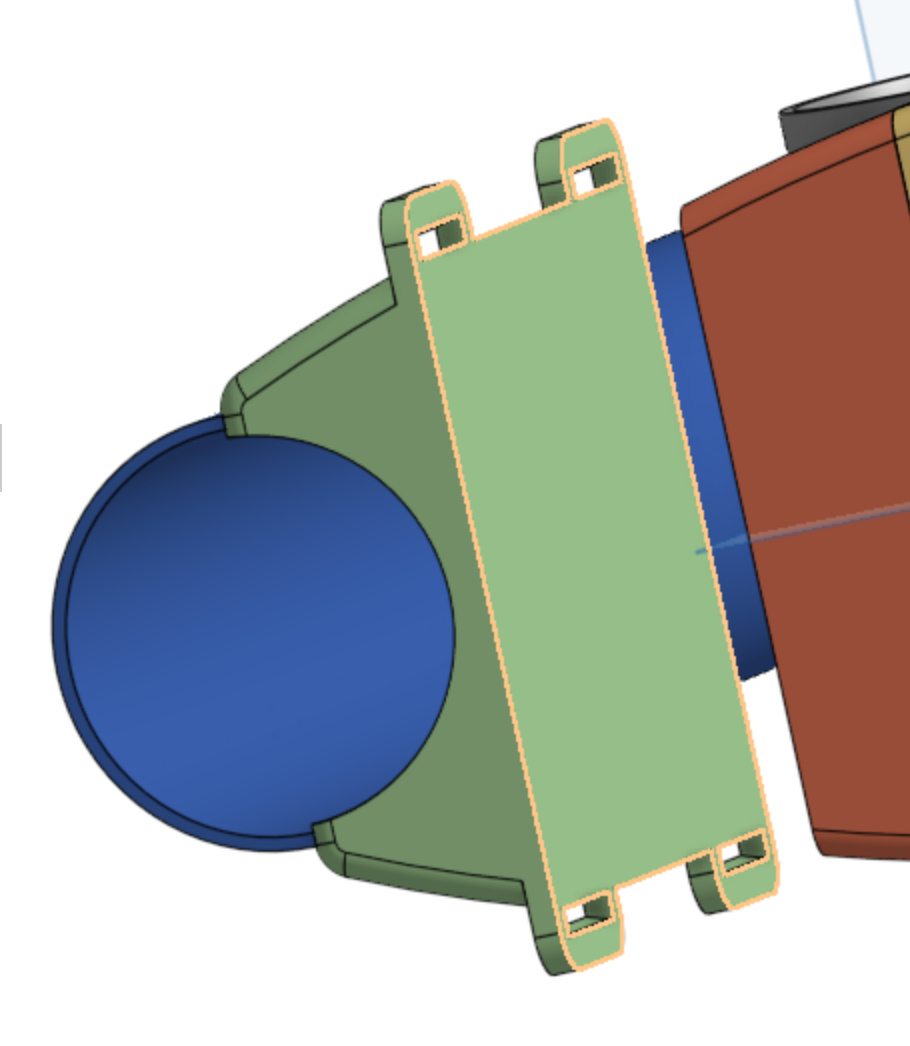
All 8 tube clamps halves are no longer identical, as a function of two features:
- The zip tie mount.
- This can be resolved by printing a duplicate mount. It won’t add any noticeable weight
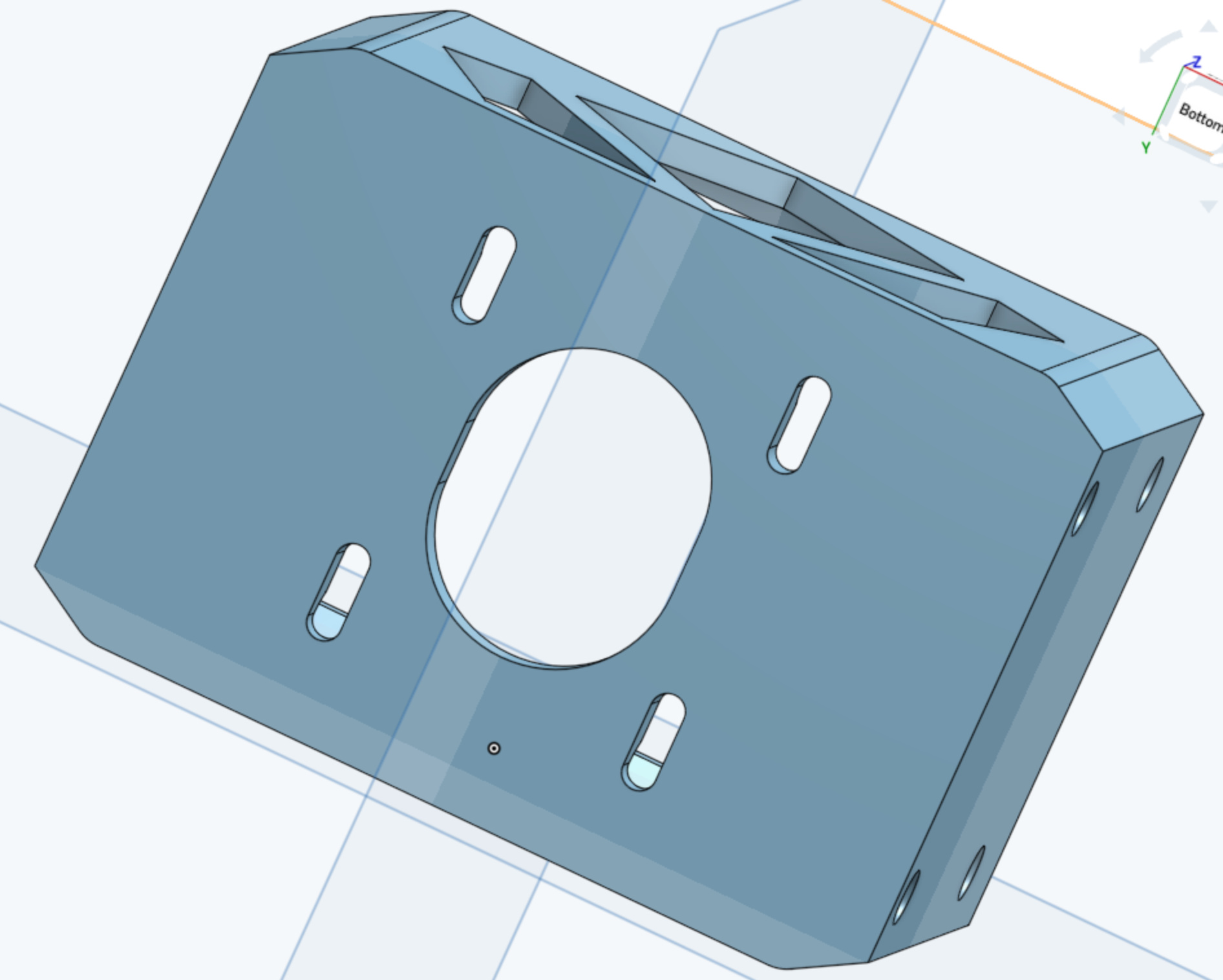
- The countersinking and filleting on the end piece.
- This is harder to resolve, as I am strongly pulled toward countersinking as a way to help align screws as well as provide a localized higher compression strength to resist crushing from the screws.
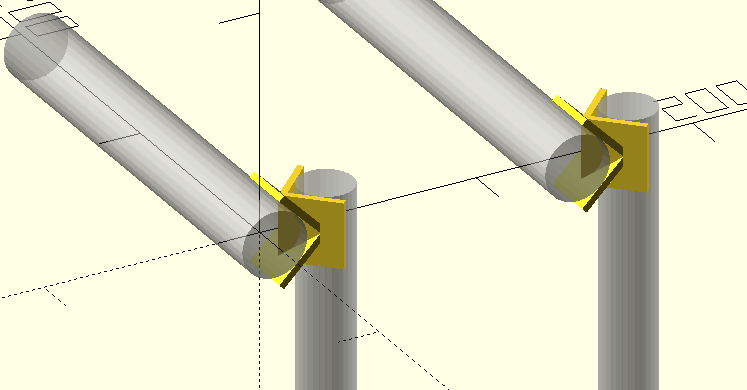
I also added some alignment pins, to handle the case where some slop is inevitable when builders can’t find standard hardware and instead have to use SAE screws:
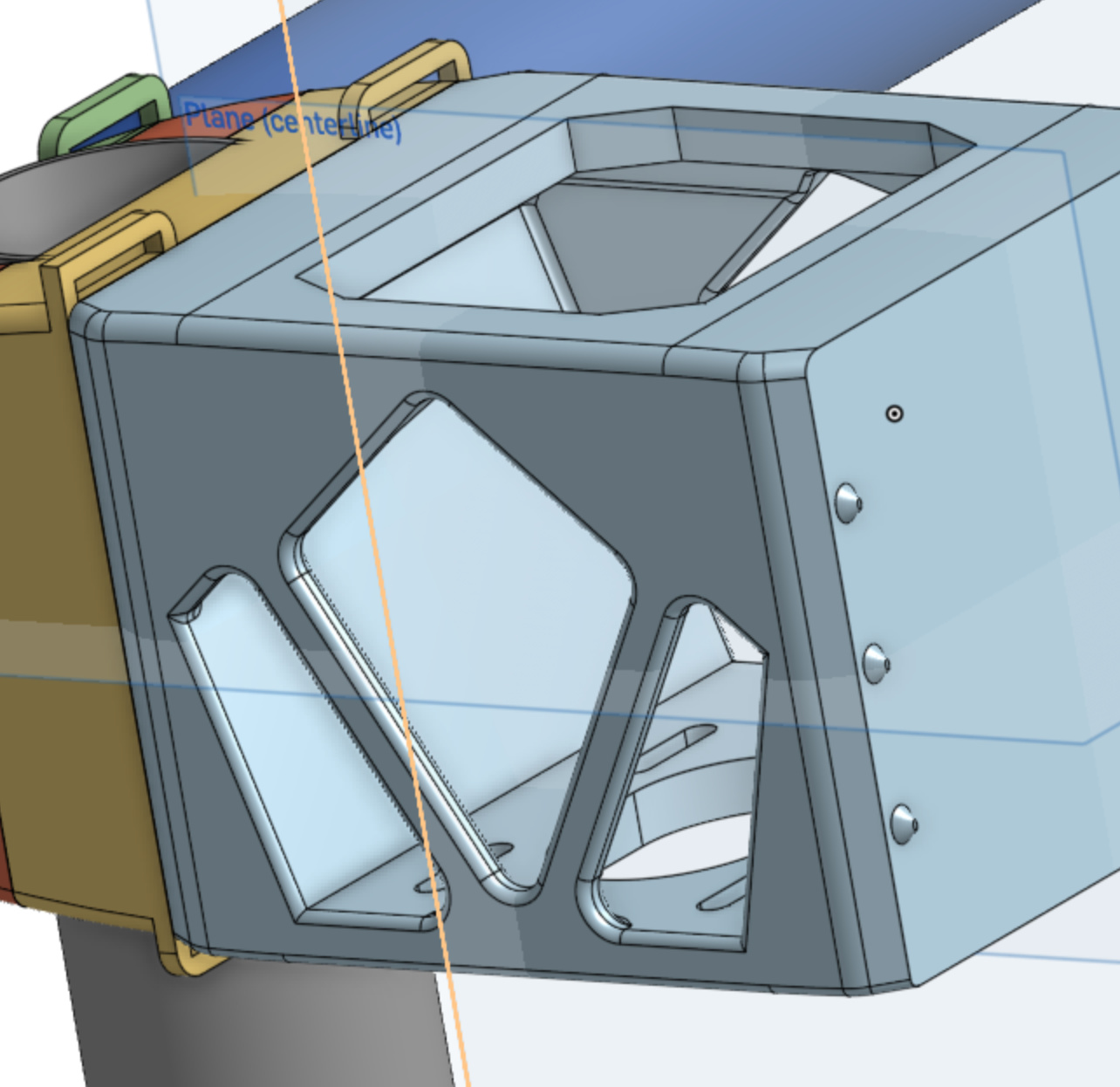
Central span
The central span is now symmetric, and includes a significant overhang at the top in order to increase bending stiffness.
I cut some air holes into the sides, these look like trusses but they’re really just designed to let the stepper motor breath better. I’ll print the central-span out of color-changing PLA and if it doesn’t heat up then I’ll probably remove these features as they complicate the build, reduce strength, and likely don’t reduce weight (because infill is low density, whereas part walls are high density).
I added slots so the motor could be adjusted. The slots are quite large right now, but should shrink in size when the clamps are changed for offset tube centers as a function of tube diameter.
Summing up
It’s about ready to print. All I need to do is provide some flats for nuts in the central span.
I remain dissatisfied with the requirement for a very long screw. While compatible threaded rod (aka all-thread) can be found at almost any hardware store, and perfectly sized screws can be supplied either in kit form or sourced from McMaster/Amazon, it still seems like a step backwards. I would love to resolve this, but I haven’t come up with any bright ideas yet.
One solution is to back off trying to have a modular approach which allows for both 1.25" x- and z-tubes. There’s really no need for that large a z-tube, and IMO the only reason someone would ever want to use that is because they’re having trouble sourcing anything other than 1.25".
If we could relax the requirement to support uniform tube sizes at the 1.25" mark, then we fall below 70mm, an important threshold for typical bolt length.