Great news: the crazy machine made its first moves on all axis!
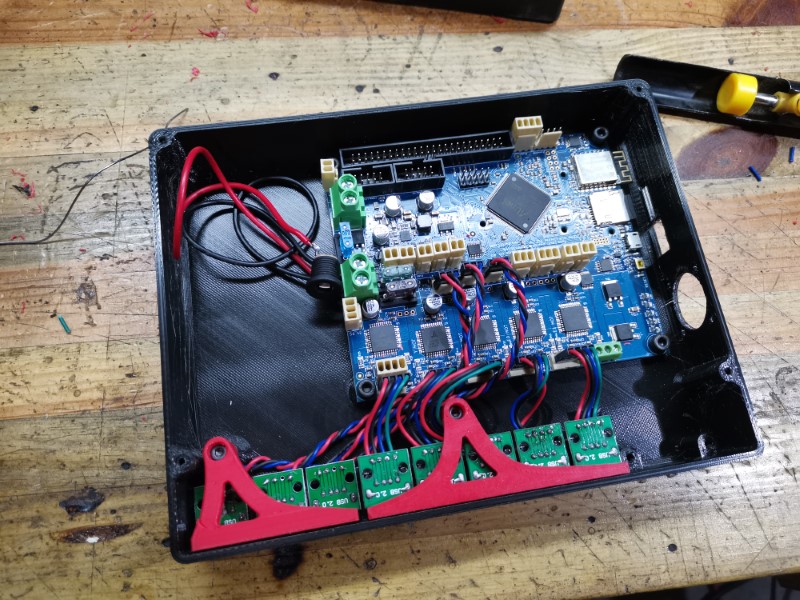
So, first I had to make the Duet work. It wasn’t particularily difficult, but I had a few trouble at first because the supplier I got it from installed a very old version of the firmware for some reason, which took me a really long time to figure out and correct.
In case you’re wondering what a Duet is: this board is kinda next level stuff: you can control everything from your compter/phone/tablet remotely, using the browser. Kind of like octoprint, but it seems to be easier to use. It features some really great stuff, like the fact that you can change things like your stepper direction, driver currents, steps per mm and basically everything that would normally be present in the Marlin “configuration.h” file in just a few clicks!
It also features more drivers protections, which is a good thing otherwise I would probably had fried tthem already. It seems like you can disconnect the steppers without too much risk. You’ll even get an alert if one stepper phase is disconnected or doesn’t work properly!
So far I find it really awesome, the wifi connexion is stable and very responsive too, no delay whatsoever. It was a bit expensive, but so far I find it worth every penny.
Still a lot more to experiment on this though, let’s wait until it prints before getting too enthusiastic!
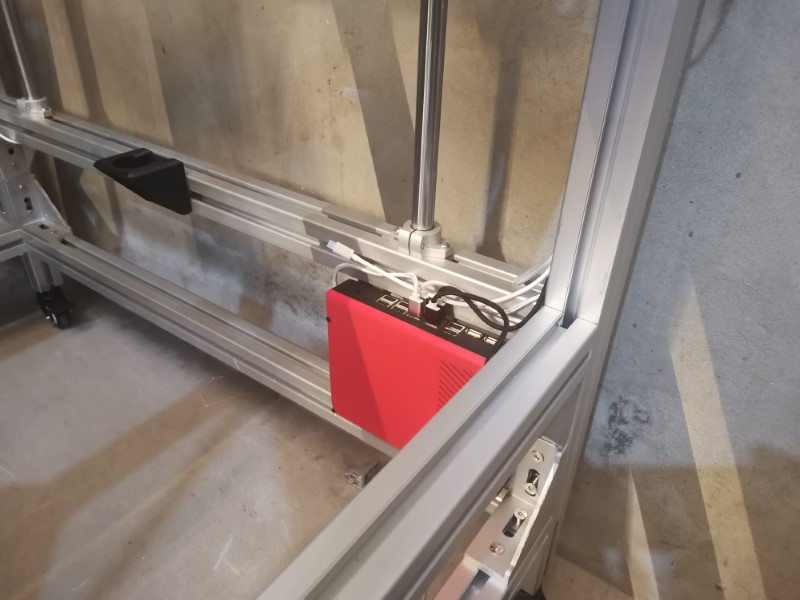
Anyway, I installed the enclosure here and made sure the wires could physically connect to it. So far so good!
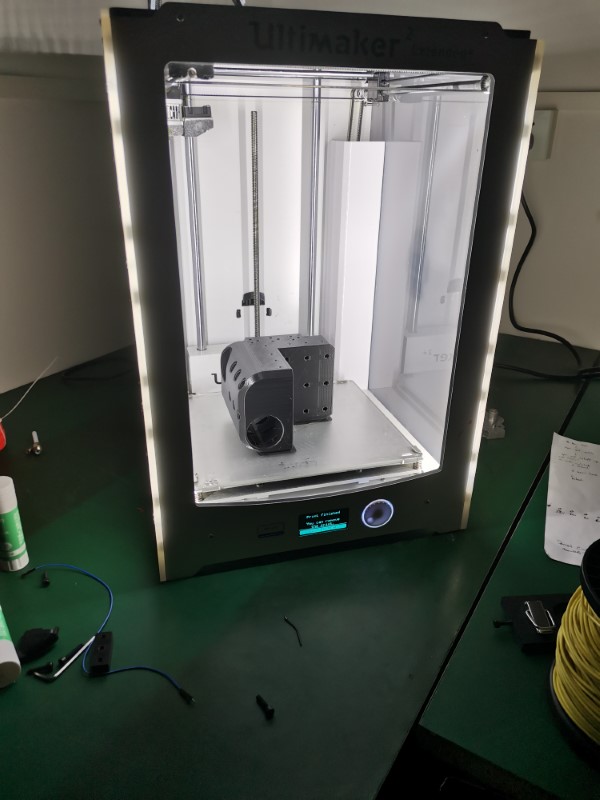
Also printed the central carriage. This thing is massive, it took litterally more than half a spool of plastic to print (550g according to my slicer)! It was printed with a 50% infill and 5 loops and took about 22 hours to print. Used the ultimaker at work to hopefully get it squared better than my delta printers could:
Weird thing is, after installing it in the frame it looks tiny:
Total weight including the linear bearings and the screws was measured at 1.3kg… That will have some inertia for sure… Hope it won’t be an issue, but I guess it will be similar to when I had this giant Z axis moving around before.
So anyway, I finally received my ball screws, so at first I installed just one because I had to wait for a second belt to arrive:
…But in the end, I couldn’t really wait so I just gave it a quick shot, just to see if it had a chance to work… And as it turned out, it worked well behond my expectations: One relatively small nema 23 stepper was enough to lift the whole bed structure with really decent speed!!
So that’s really great news for me, adding an other motor will double the power which should be more than enough to lift the whole thing with the added weights of the bed, glass and everything!
The other axis are much more silent and they are fast and responsive too.
Next step is to design a print head system and start working on the bed.










 . Mine is 110 with a ssr doing the switching off the heat bed pins on the duet.
. Mine is 110 with a ssr doing the switching off the heat bed pins on the duet.