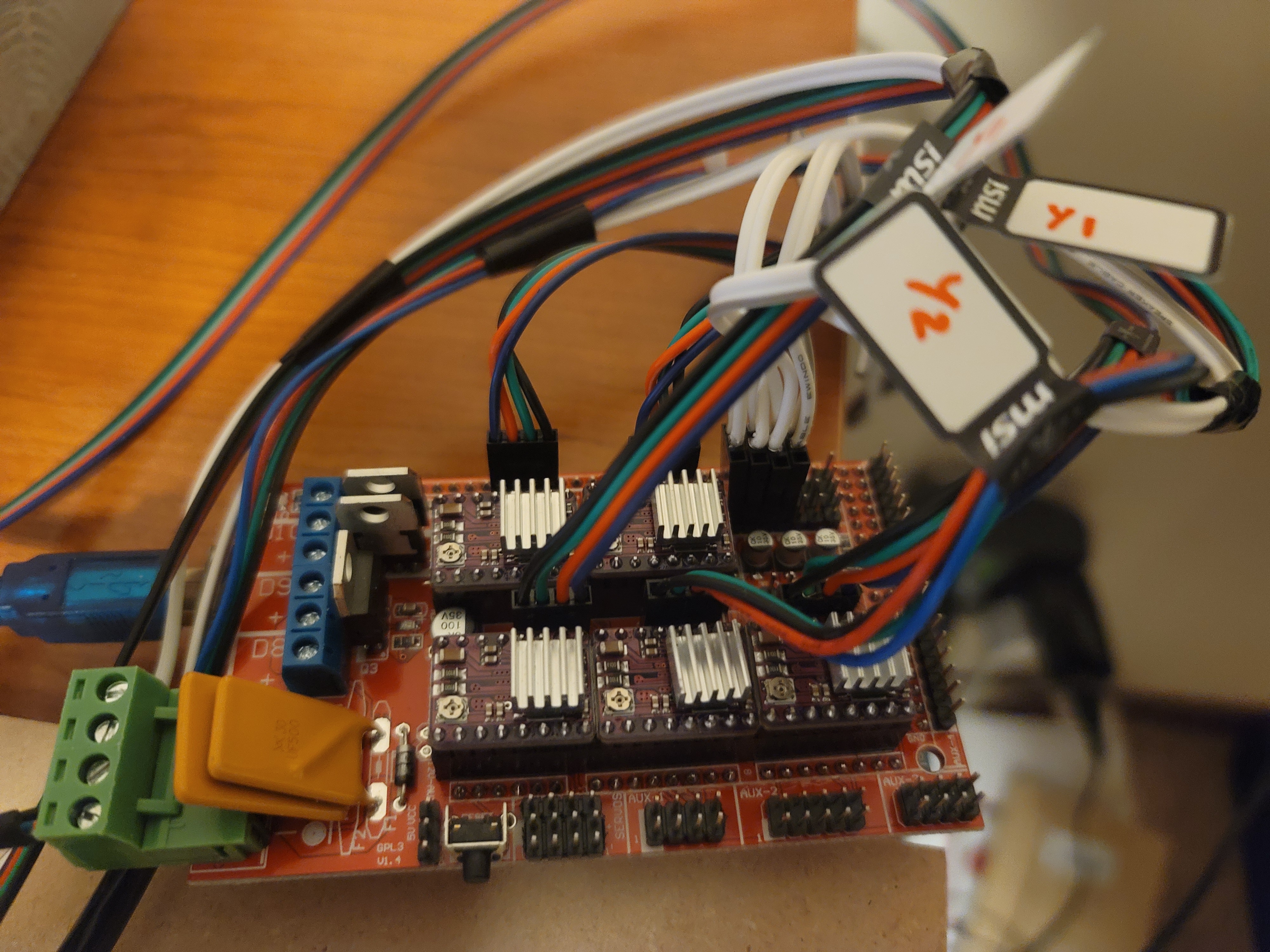
I just plugged in everything, how do I test it? I want to make sure that both x1 and x2 motors are moving in right direction (similar check for y1 and y2).
I have v1Pi image on rpi4 running and I’m able to connect with cncjs and with octoprint. When I press move x and y both motors move correctly. When I press home, the machine wants to go beyond the end stops. Is the octoprint home option suppose to do that?
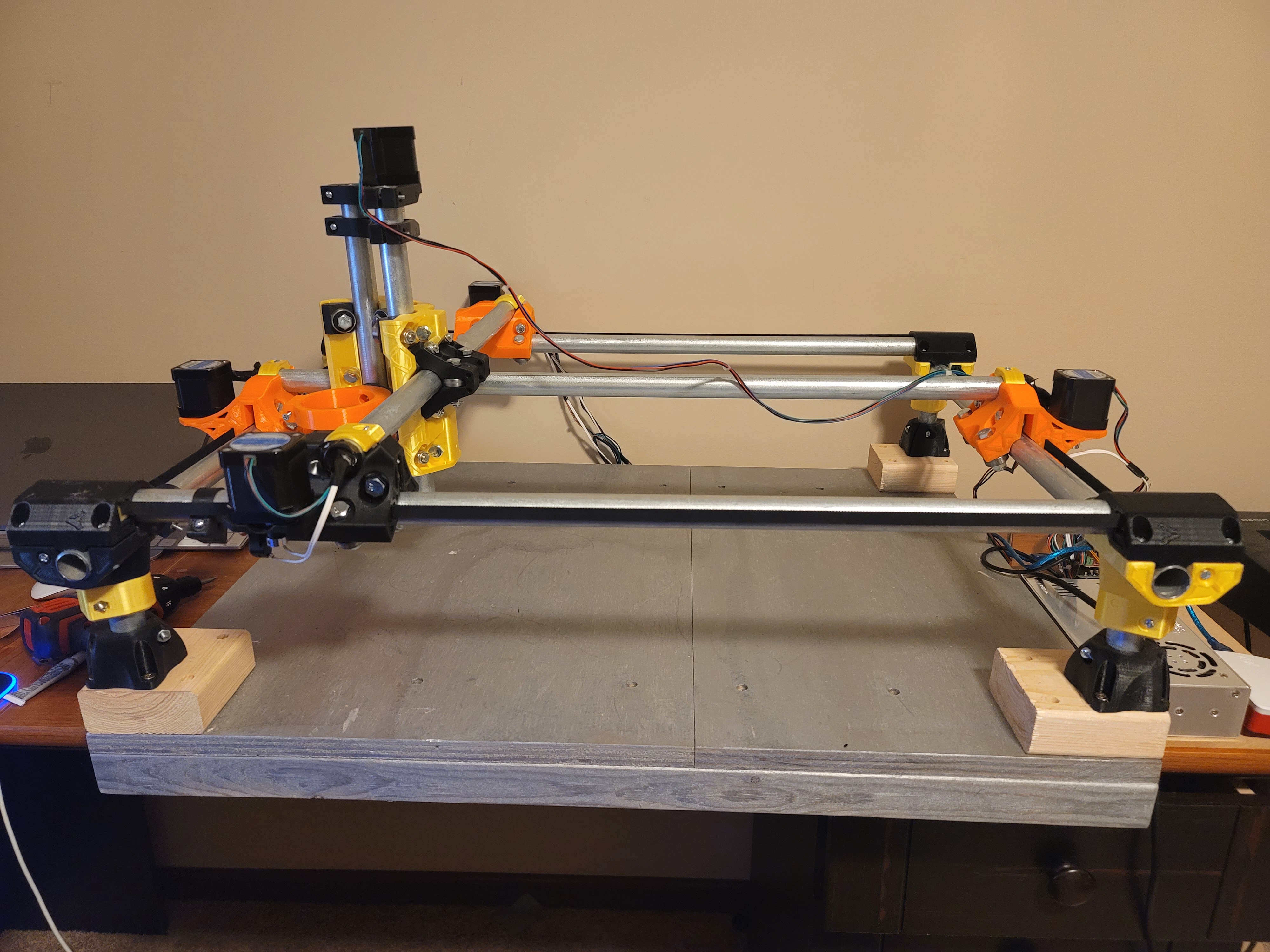
Motors are connected in this way top left x1, bottom left x2. Top right y1, bottom middle y2, bottom right z
If you’re using octoprint, it is easy. Just go to the terminal rab and put M119 in and hit send. That should show you what Marlin thinks all the ends stops are. Then hold one down (with your finger or some tape) and send another M119. I think it will make sense when you try it.
@jeffeb3 – Thank you for showing me M119 command. I was able to do some troubleshooting with it.
End stop y-min was acting up, it was not plugged in right. I used continuity check to ensure it was soldered right and then pushed in correctly. I have fixed it now.
All end stops are working correctly.
Send: M119
Recv: Reporting endstop status
Recv: x_min: open
Recv: x2_min: open
Recv: y_min: open
Recv: y2_min: open
Recv: z_min: open
Recv: ok
When I press any endstop it triggers that one correctly now. I do not have z endstops but it reports it as open, is that ok?
Also, should i try Homeing now, if yes, what is the recommended way to do it?
Edit: I tried using the Home icon on octoprint, and it went all the way on the left and tried to go beyond the end stops. I unplugged machine, and plugged it back again. I tested the endstop status in leftmost position and i get this:
Send: M119
Recv: Reporting endstop status
Recv: x_min: TRIGGERED
Recv: x2_min: TRIGGERED
Recv: y_min: open
Recv: y2_min: open
Recv: z_min: open
Recv: ok
Which means that the endstops are getting triggered correctly, but for some reason homing sequence is not taking them into account.