
8 Likes
Looking good
Hey! I just watched a video of yours yesterday lol
1 Like
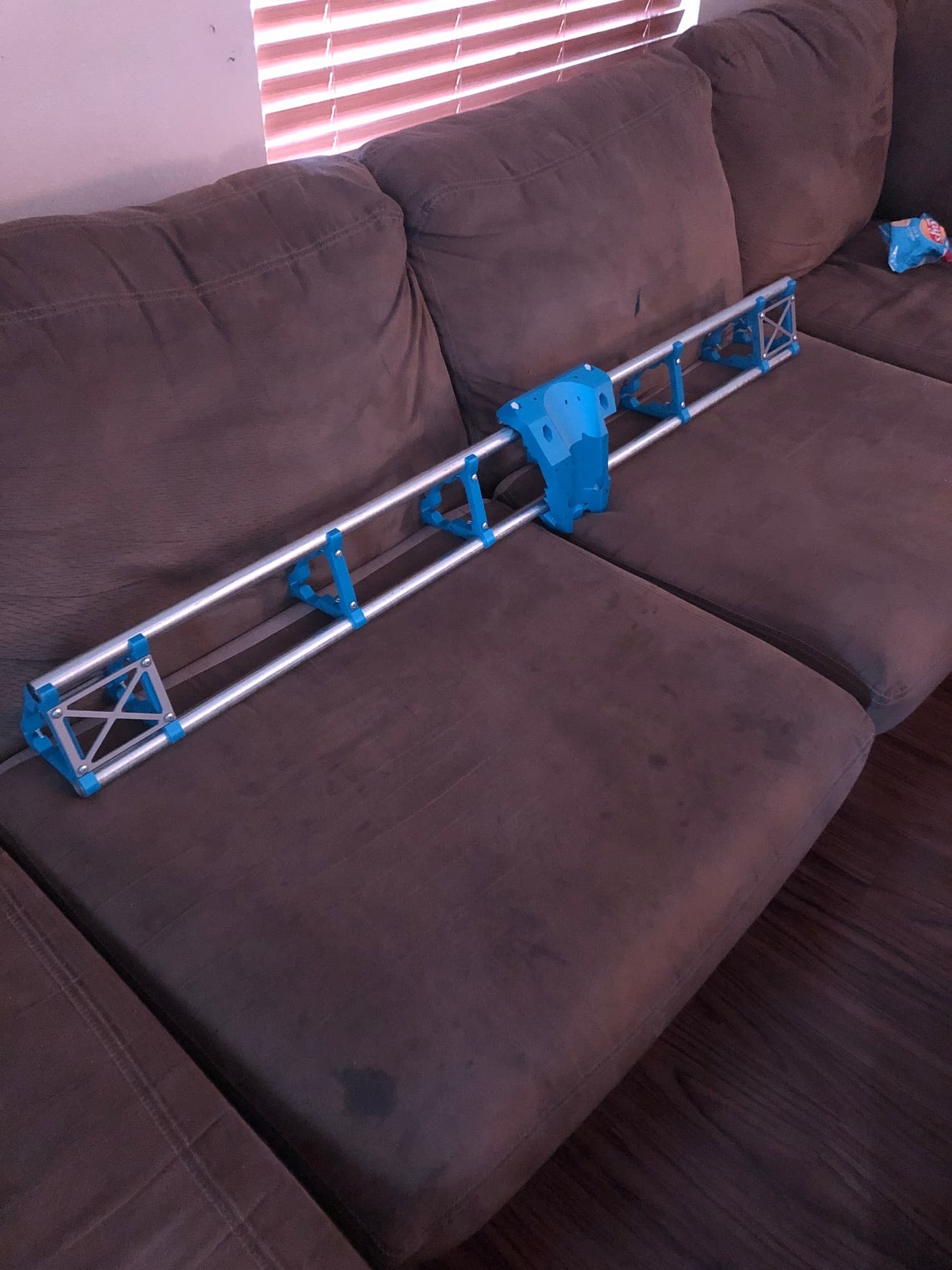




It is COMPLETE! well almost. I’m super excited to get this thing running. Ready to build a table now to move forward. Any tips or suggestions welcomed. I probably cant get started on that for another week so plenty of time to plan.
4 Likes
Neat color combination, is that space gray? Smart move to paint YZ plates upfront.
What kind of table/look are you going for? Some ideas at Cost and Weight smart table designs that would make MacGyver proud, personally, have built a minimally viable rolling sled that will probably be used to bootstrap building a Paulk inspired table.
1 Like
That looks great, I need to swap the navy blue to something a bit lighter! That looks great.
1 Like
its galaxy silver and azure blue from prusa. the paint for the yz plates was just a random can of metallic blue spray paint i had laying around. youtube series soon to come once i get everything done and videos edited. so far ive documented the whole thing and plan to do some additional commentary of things ive learned along the way and suggestions for anyone planning a build.
4 Likes

Got it mounted on my 5x10 torsion box table. Coming right along. Just have to wire everything up now!
4 Likes
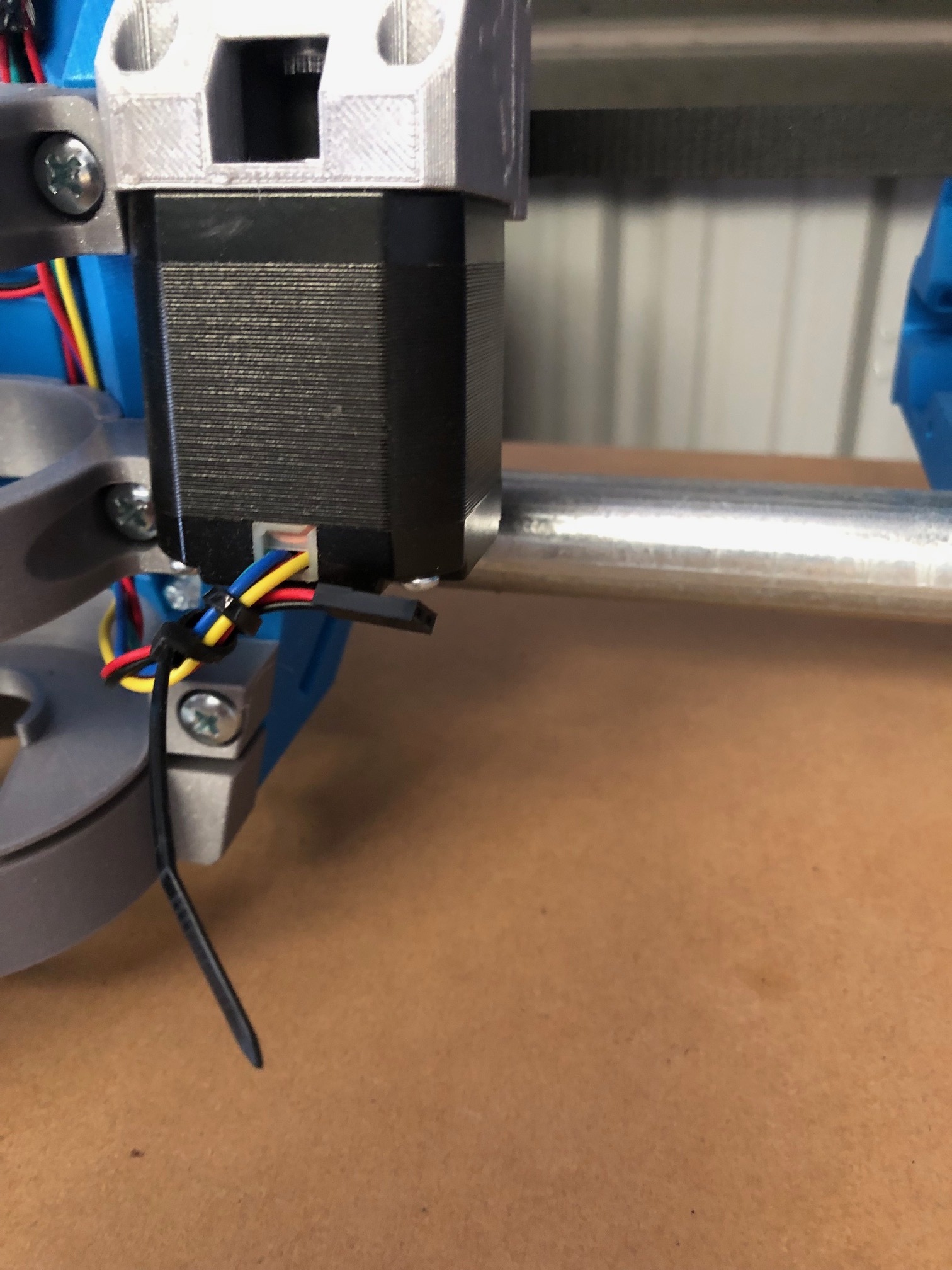
Does anyone know what this wire is for? I saw it in the instruction photos so I put it on there but I don’t see anything in the instructions later to connect it to. My guess is a second limit switch for the x axis, but I can’t see where it would mount to. I also don’t know if a second one is needed. The y and z axis both only have one so I’m thinking they are only needed for homing?? Is the travel distance all set in the software end from there?
1 Like
I believe it is for the touch plate? What board are you running?
Here is a picture of the SKR dual endtop conection https://docs.v1engineering.com/img/LR3_endstops.jpg
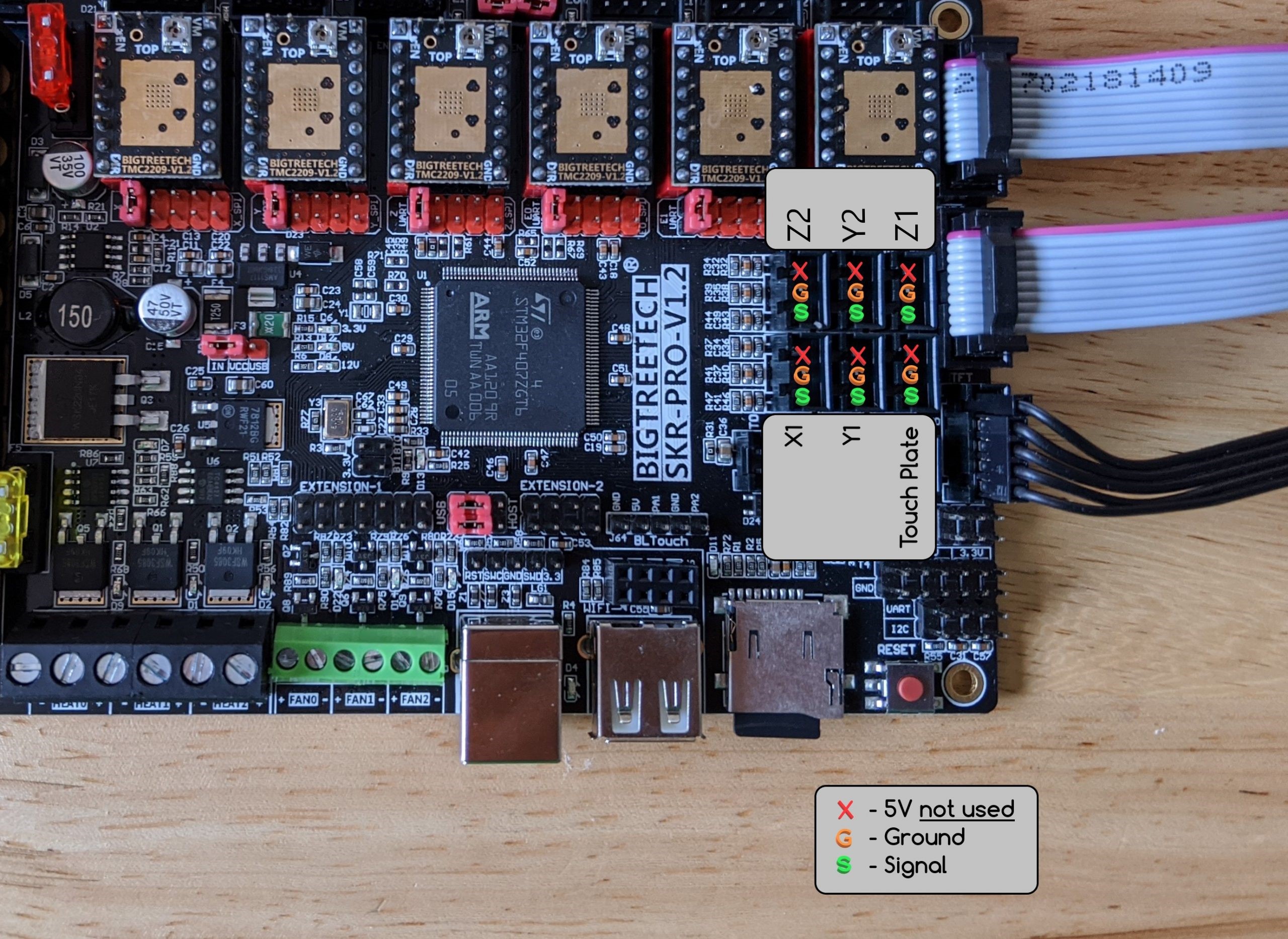{kind=link}
3 Likes
Ahhh the touch plate! That would make sense. I haven’t gotten that far yet to play with it for calibration. I’m actually trying to wire up to an arduino board with grbl firmware. I’ve chosen this mainly since I’m familiar with using and coding arduino. So my hope is that it will give me some more flexibility if I want to add other features in the future. Also with external drivers, I can potentially upgrade to stronger motors if I find the need. And everything is individual parts that can easily be replaced if anything goes bad. That’s my thinking anyway, perhaps I will regret it but we’ll see lol.
2 Likes
I’m beginning to regret some of my life choices lol. Now that I’m almost done with my wiring its firmware time. I was going to try and use arduino for my controller board with grbl firmware, but I’m starting to wonder if this is going to work out as hoped. I want to have dual endstop support with separate drivers for the y and z axes so I can auto square when homing. Also want to work in a LCD offline controller, some relays to turn on and off the router and a vacuum, and perhaps some custom fan controls for cooling my control box at some point. I have chosen to work with arduino since I am somewhat familiar with coding for it, but the grbl firmware is a little above my comfort level for coding. It doesn’t appear that grbl is naturally set up for some of this. Maybe I’m mistaken?? I’ve found a few forks from the main grbl mega github where some people have tweaked it to have some of these features, but I’m not sure which to use. Maybe someone out there has run into this already and can point me in the right direction. Any tips would be much appreciated.
1 Like
Just some additional info, I currently have no shield or ramps etc. boards. I don’t think I should really need one, I have external stepper drivers, TB6600. If I have to get down and dirty with customizing my own firmware I will, but I’m sure someone has probably already sorted this out and I don’t want to re-invent the wheel.
1 Like
There is a grbl-5x fork of the original grbl firmware. It works on mega arduinos, and the rambo (which has built in drivers). They don’t have screens (except for ones that attach over serial).
There is also fluidnc and the grbl_esp32 boards. They have built in wifi too, so you can use a phone, tablet, or for a screen, and it runs from an sd card without an attached computer. Specifically the 6 pack is probably your best bet.
2 Likes
I have come across that one (grbl-5x) and also another by bdurbrow. His has implemented sd card and lcd screen functions, I’m leaning toward that currently but I have to dive into some code now and see how its set up. It has a lot of features I don’t think I need. But that developer doesn’t seem like he’s been active for a couple years so I’m not sure if its a good build or not yet. I do want to stick with the arduino mega for the board though so I can customize additions as needed. I just need to understand the code a bit better first I think.
1 Like
Well I’m pleased to report I got my lowrider to move around a bit today! After much painstaking troubleshooting I finally got to that point only to be introduced with more problems lol. So far I have dual motor axes working correctly on both the y and z after applying a step invert mask in UGS to invert the second y motor. I’m using the grbl-mega-5x firmware with only a couple minor edits to clone the y and z axis for axis 4 and 5 and edits to the homing cycles to correspond to this change. Oddly though it seems one y motor moves the wrong direction for only a moment at random times when testing jogging up and down. It seems to work better when jogging repeatedly the same direction, and upon jogging back the opposite direction one motor moves the wrong way then switched back and moves the right way. I can’t for the life of me think of what on earth could be happening here. Aside from that I have no limit switches registering in UGS. So tomorrow I’ll be testing all my limit switch wiring but I am pretty sure its all correct. Maybe I need to change a setting or something simple in the firmware. But I decided to take the victory and leave the new problems for later lol. But I’m getting close now 
1 Like
Oh and also Universal G code Sender has crashed on me like 4 times already. I’m thinking if this issue persists I might want to try something else if anyone has a good recommendation. Eventually I plan to be operating from an SD card on the LCD offline controller, but I still need a computer hookup for testing and calibration right now.
1 Like
CNCjs works very well, and seems pretty lightweight.
2 Likes
This supports lowrider3 with dual endstops for auto squaring on homing cycle?
1 Like
Dual endstops is baked into your firmware not the control software. So yes dual endstops work with cncjs provided you set them up in your custom firmware.
1 Like