Hello, the suggested Nema17 for the lowrider has 2A and 59 N.cm holding torque.
However, I have spares Nema17 with 1.7A and 40N.cm. I would like to know if this would be sufficient for this project.
Thank you
Hello, the suggested Nema17 for the lowrider has 2A and 59 N.cm holding torque.
However, I have spares Nema17 with 1.7A and 40N.cm. I would like to know if this would be sufficient for this project.
Thank you
That’s significantly lower than the recommended torque. I don’t have a LowRider, so can’t speak to how much “slack” is in the recommended spec motor. The Z motors basically lift the whole machine, so if it were me I’d spring for the beefier motors for Z, and maybe use the smaller ones for the X and Y axis. If you’ve got them you can try them out. The good news is that if the lighter duty motors don’t work out, the “right sized” ones fit in the same space, so other than the pain of snaking new stepper wires, the swap shouldn’t be hard to do.
Ryan’s minimum spec for steppers for the MPCNC was only 42oz.in (29N.cm), but I haven’t found a similar spec for the LowRider. Just a guess, but I would expect your machine to work fine using your lower torque motors, but you may have to select a slightly lower max feedrate and perhaps a lower acceleration.
Thank you for quick responses.
I have heard of issues in the lowrider two z motors not being able to hold up the gantry and spindles crashing down into the work on power down. This has me curious about the holding power of the motors coming in the hardware kit for the lowrider 3 I am going to build soon. Any comments? Maybe this issue has been improved in v3 Idk.
V1E LowRider 3 kit I ordered came with Steppers rated at Torque: 5.5Kg.cm (76 oz-in). This thread is another reminder of why I ordered the kit, am screwing up so much less thanks to the kit’s bundled components.
That seems pretty stout from what I’ve seen in the Nema 17 category. Ya I figured I’d keep it simple and get the kit rather than trying to source everything myself to maybe pinch a few pennies. Plus I’m trying to get up and running asap, but still have so much to learn and figure out. Thanks for the info, good to know what I’m getting into.
Holding power only applies when the power is on. Once you kill power to the steppers the weight of the spindle and gantry can overcome the friction of the lead screws and stepper bearings.
Can anyone tell me if this still happens with the v3 design? I may need to put in some kind of switch to power off the spindle before steppers power down if that is the case. Or is there another solution anyone has come up with?
The issue with the LR2 was always when the motors were powered off when the job ended. While powered, the motors did not allow the tool to crash into the work, unless there was something else wrong.
The LR3 will do the same. If the Z motors are powered off, the 4 start screws will easily allow the gantry to fall, crashing the tool into the work.
As such, we recommend removing M84 from your end gcode, and if you use a gcode sender like Repetier Host or Pronterface, make sure that it doesn’t send that M84 at the end of job either. Leaving hte board and motors powered on does take care of the problem.
Alternatively, replacing the lead screws and Z nuts with 1 start screws (2mm lead instead of 8) also takes care of the problem, but does require you to be more careful about your Z travel speeds.
I just leave the motors powered on, and it’s never been a problem for me.
You have to drop the max speed a lot, to 5mm/s or so.
I put a big vise on my LR3 to test it and it lifted it fine. It has plenty of power, but low enough friction to drop when unpowered. Just park it in a safe place first.
This is part of why it has the name.
Thanks for info about keeping motors powered while hovering above work piece.
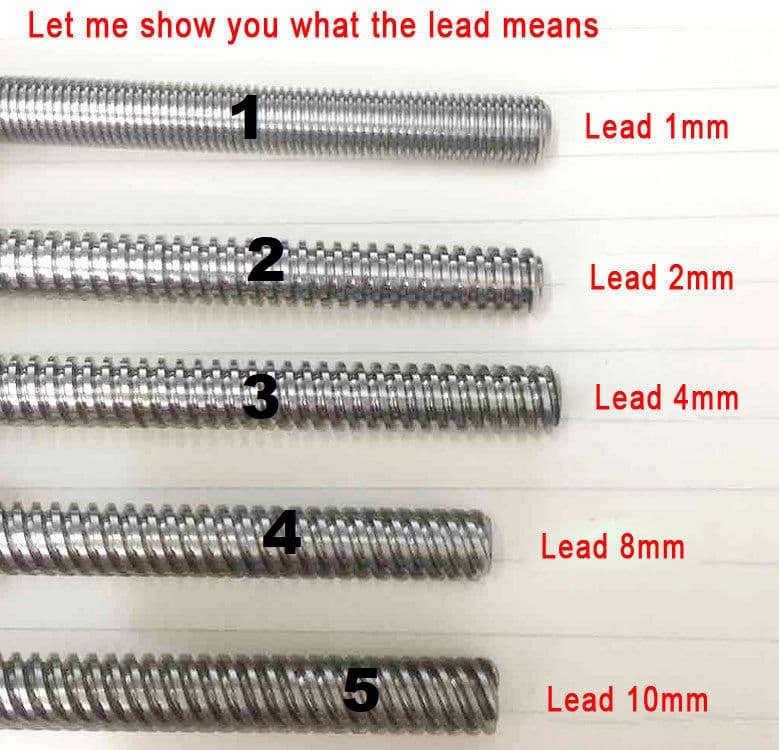
Why is Lead of thread 8mm default for the builds, is it steep enough to let gravity assist with some downward force, and/or other reasons? Seen a few posts of people switching to Lead 2mm to help avoid gantry moves when unpowered, maybe increases resolution too I guess. What are the downsides of Lead 2mm, just speed?
Would Lead 4mm be a good middle ground, or does that drop when unpowered too?
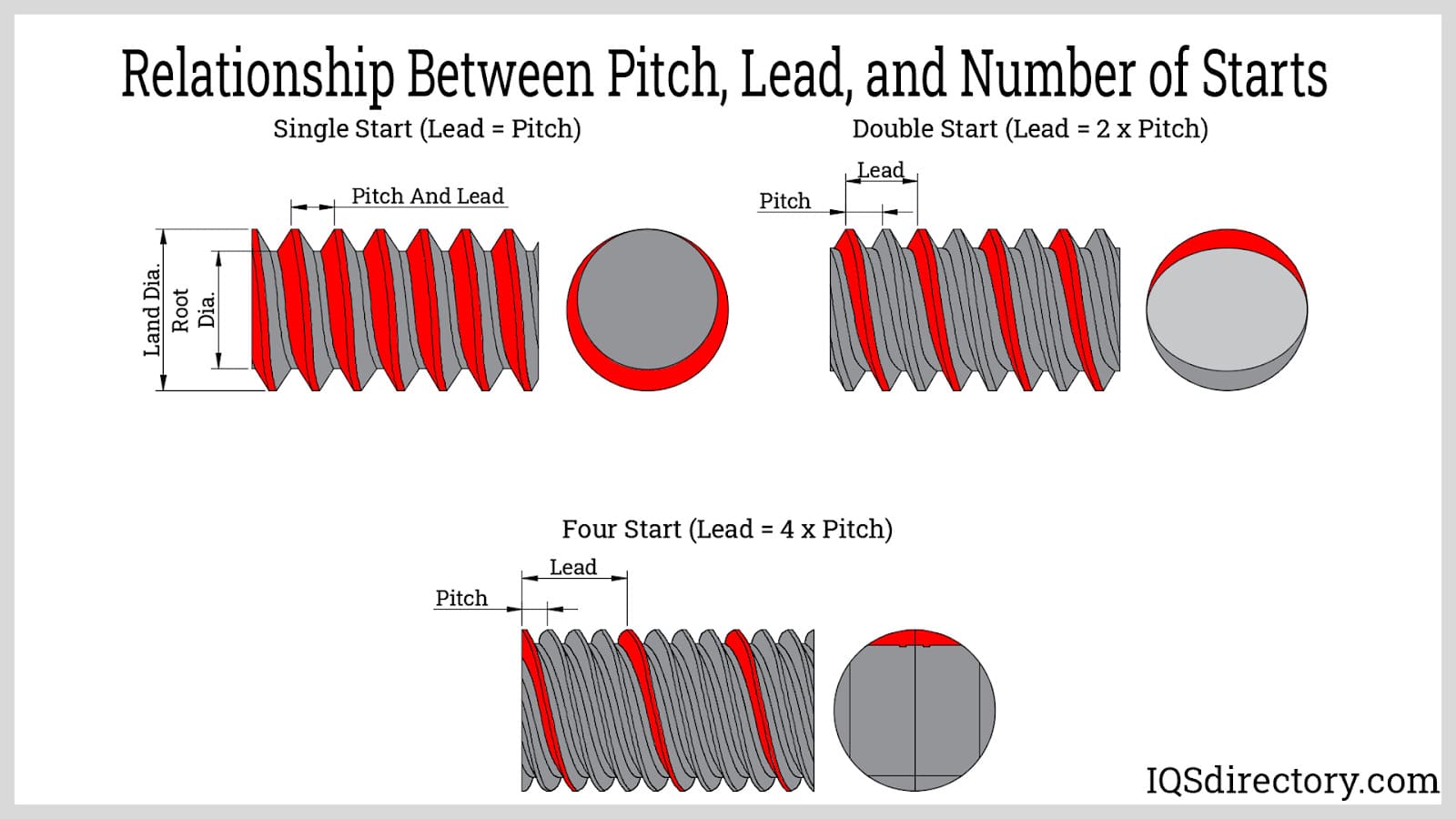
For the T8 lead screws used on the V1 machines, I typically only see two types, single start and four start. Start determines how many threads start at the end of a rod and can be shown in this graphic. Four start gets its steeper pitch by interweaving the threads. The middle ground would be double start, but in my shopping around, I’ve not seen double start, T8 lead screws.
2 start can be found, but they’re expensive, and tend to e low stock, so you get what you get.
1 start are less common than 4 start, but still easy to get. Usually more expensife though
An alternative is 8mm regular threaded rod, but it’s 1.25mm pitch, so even slower, but the advantage is that it’s also even cheaper, and easy to find. Well, maybe in the USA 5/16" threaded rod is easier. I remember older V1 machines used this. I have some 8mm threaded rod hanging around, but it’s easier for me to just leave motors powered. I’d probably go to the threaded rod if I needed the functionality though. Simple enough to design and print an adapter for the nut, I think.
But I digress…
4 start 8mm lead seems to be where the economy of scale works, it’s in the most demand, so it’s cheapest, therefore in more demand., but the other stuff exists if you really need it.
I would go a bit faster than Jeff’s recommendation, but I also run 24V power, which makes a difference.
The 2mm is what we have been calling 1 start. The T8 4 start has 2mm pitch, but 4 starts, so it move 8mm in one turn.
The difference and tradeoff is in speed. The 4 start (8mm) is faster. So the motor moves in an “ideal” rpms for most operations. Stepper motors lose torque at high speeds (that penalty is reduced with higher voltage supplies, but it it often misunderstood).
The 1 start (2mm) has more force at slow speeds, but moving at 10mm/s (the default max speed in the firmware), with the standard 12V PSU causes many builds problems. The steppers skip steps because the friction is the same in these leadscrews, and isn’t affected by the extra force. When the steppers move faster, they lose torque and start skipping steps. The solutions are to either go to a 4 start, reduce the top speed, increase the psu voltage, or some combination.
We know 12V, 4-start, 10mm/s works. Outside of that, we have some guesses, but we don’t have 10k users that have tested it.
{kind=link}