Finaly ready for testing … I started printing on June 2019, finish mounting on last December … only now I am testing it.
I purchesed all components in Italy (Arduino Mega 2560 + Ramps 1.4, Stainless steel pipes 25 mm)
All is working except for the dual end stop function.
Sending with Repetier-Host the gcode M119 all micro switc are working properly (engaged when activated) however when I send the command Homing from the LCD it make the correct zero on Z but not on Y, It looks like it can nor reach the micro switch.
As next step I will try to reverse the connectio for the Y microswitces on the Ramps.
Can someone suggest me what else could be the problem?
Now, all is OK after I reversed the connectin fot the Y microswitches even if I really didn’t undestand the cabling mistake.
Many thanks to Ryan and the V1 Enginering for sharing such a nice project.
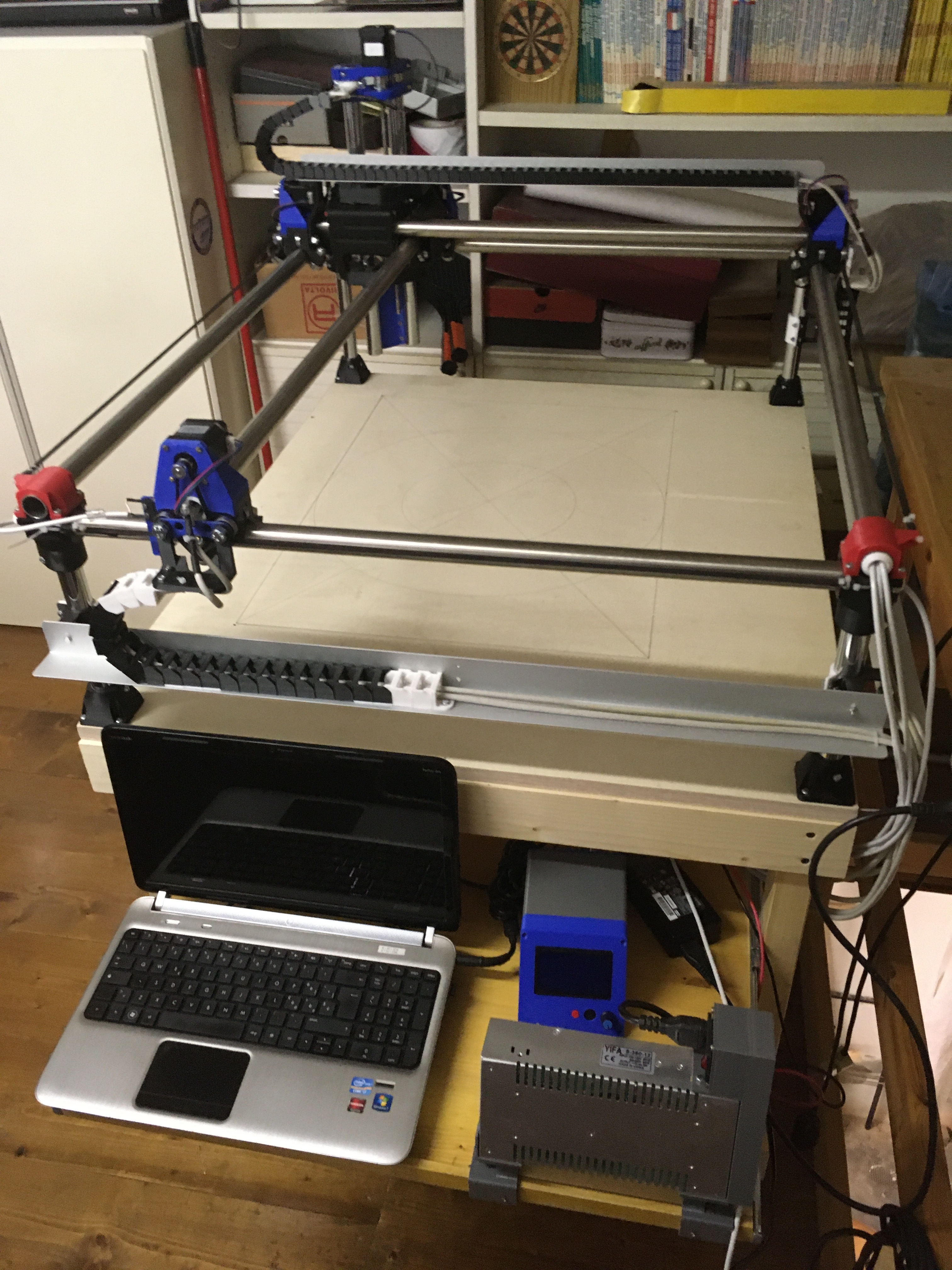
Here is how it looks like.
Next step will be: replace the pen with a Makita 3709, since the suggested Dewalt is not sold in Italy.
Many Thanks
Gianpaolo
The dual endstop configuration is primarily aimed at bringing the machine into square at the start of a work session. It does this by adjusting the position of each end of the axis independently. After a successful homing sequence (establishing a 90 degree angle between the X and Y axes), the motors move in lockstep, but during dual endstop homing they are managed separately by the controller.
Each endstop must be matched in the controller’s firmware configuration with the motor that drives that end of the axis onto that endstop switch. The controller expects to drive each motor on to its own switch until it is triggered, then sets the known position of that end of the axis, applying an offset if the machine isn’t naturally square when at rest. If the endstops for the Y axis are matched with the wrong motor, the controller is moving the “left side” motor, but the “left side” switch doesn’t get triggered so it just keeps moving the motor. Even though the “right side” switch may get triggered, the controller isn’t paying attention to that switch because it’s moving the “left side” motor.
The specific value for the offset is determined through the squaring calibration procedure on the Docs page.