Guten Abend
Hab am Projekt Scara Sandtisch weiter gemacht.
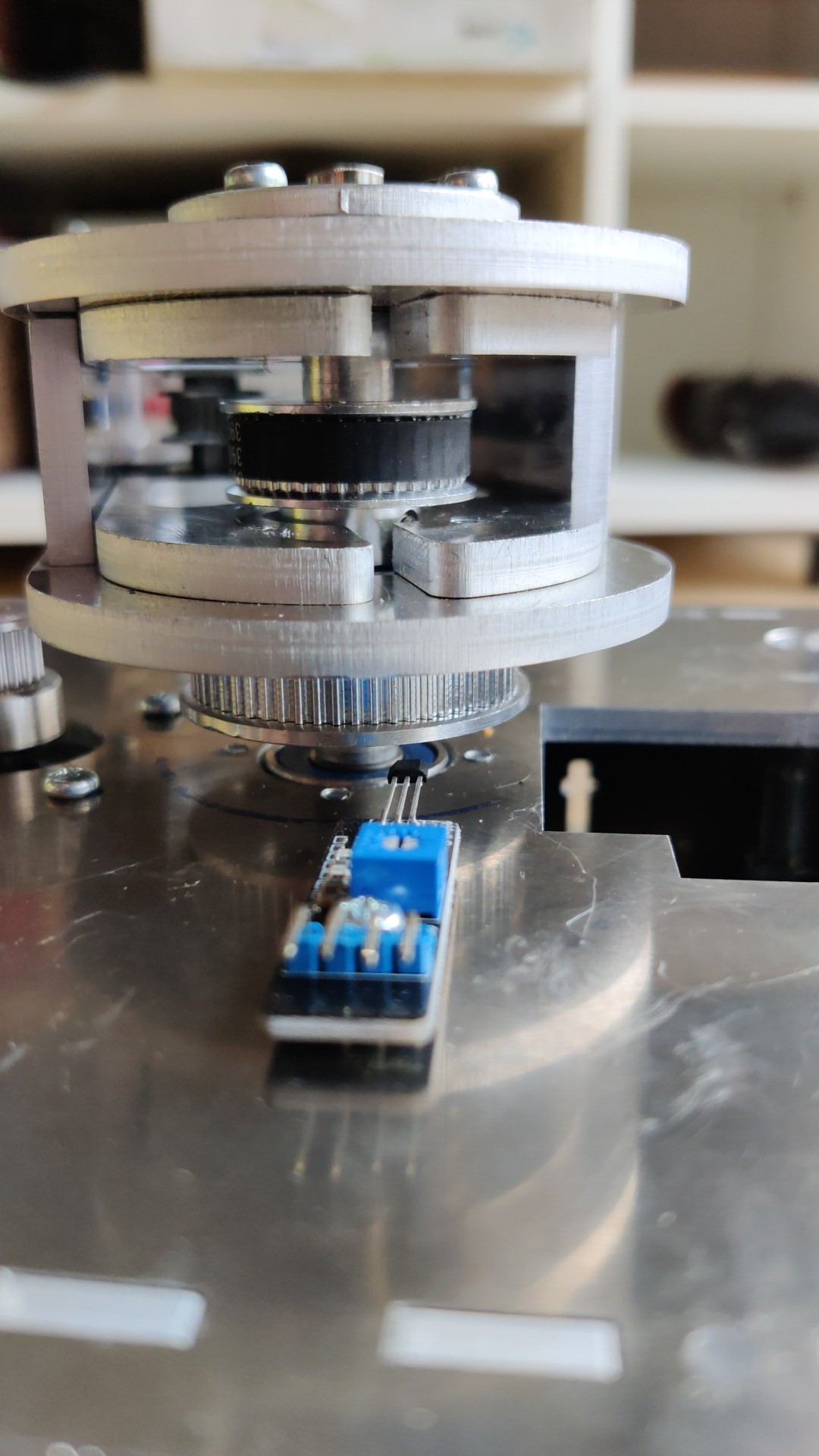
Die Arme der Sandplatten Halter sind jetzt nun aus Aluminium hergestellt,
da die ersten aus Plexiglass hergestellt wurden und
dieses Material zu spröde für diese Anwendung und deswegen gebrochen ist.

Der Riemen vom Äuseren Arm hat jetzt einen Spanner bekommen damit er straffer anliegt


Mechanisch ist der Scara sehr gelungen.
Mich quält aber immer noch meine Inkompetenz bezüglich der Programmierung.
Ich habe sehr viel Elektronik von anderen zu Teil aufgegebenen Projekten rummliegen.
- Arduino Uno mit CNC Shield
- Arduino Mega mit Ramps 1.4
- RPI 3 +4 mit HAT Stepper driver
- Nema 17 Bipolar Motoren
…
Könnt ihr mir bitte zur besten Auswahl der Hardware helfen und bei Programmieren auch.
Habe es mit Arduino Mega und Ramps 1.4 mit Marlin versucht
aber komme aber nicht wirklich weiter.
Habe versucht die neueste Version von Marlin zu konfigurieren, ich war erfolglos.
Habe Marlin Vitaminrad erfolglos versucht.
Ich zweifle so lansam das Marlin überhaupt das richtige für einen SCARA ist.
Also hab ich michh in Linux CNC versucht, auch da hab ich keinen Druchblick.
So langsam komme ich an meine persönlichen Grenzen.
Könnt ihr mir bitte helfen den richtigen Weg zu finden.
Danke Klaus