I don’t believe Repetier Host or UGS takes over the USB port unless they are actively running. Repetier Server can grab it at system start-up, so I always make sure to uncheck the Server component when going through the Repetier install process.
1 Like
This is a very common sticking point, Do not install “server” unless you know why you are doing it…yet they have it as a defualt option for some reason.
I replaced the power cord and I no longer get a spark. But I am still getting a time out error trying to upload grbl. How can I check to make sure nothing is blocking the port?
Even when I try to flash marlin on the board I get a timeout error. Am I suppose to have a jumper in one of these pins maybe?

Disconnect everything except USB and 12V power.
I have done that as well. Still nothing. I recently found this and was wondering if anyone was familiar with it.
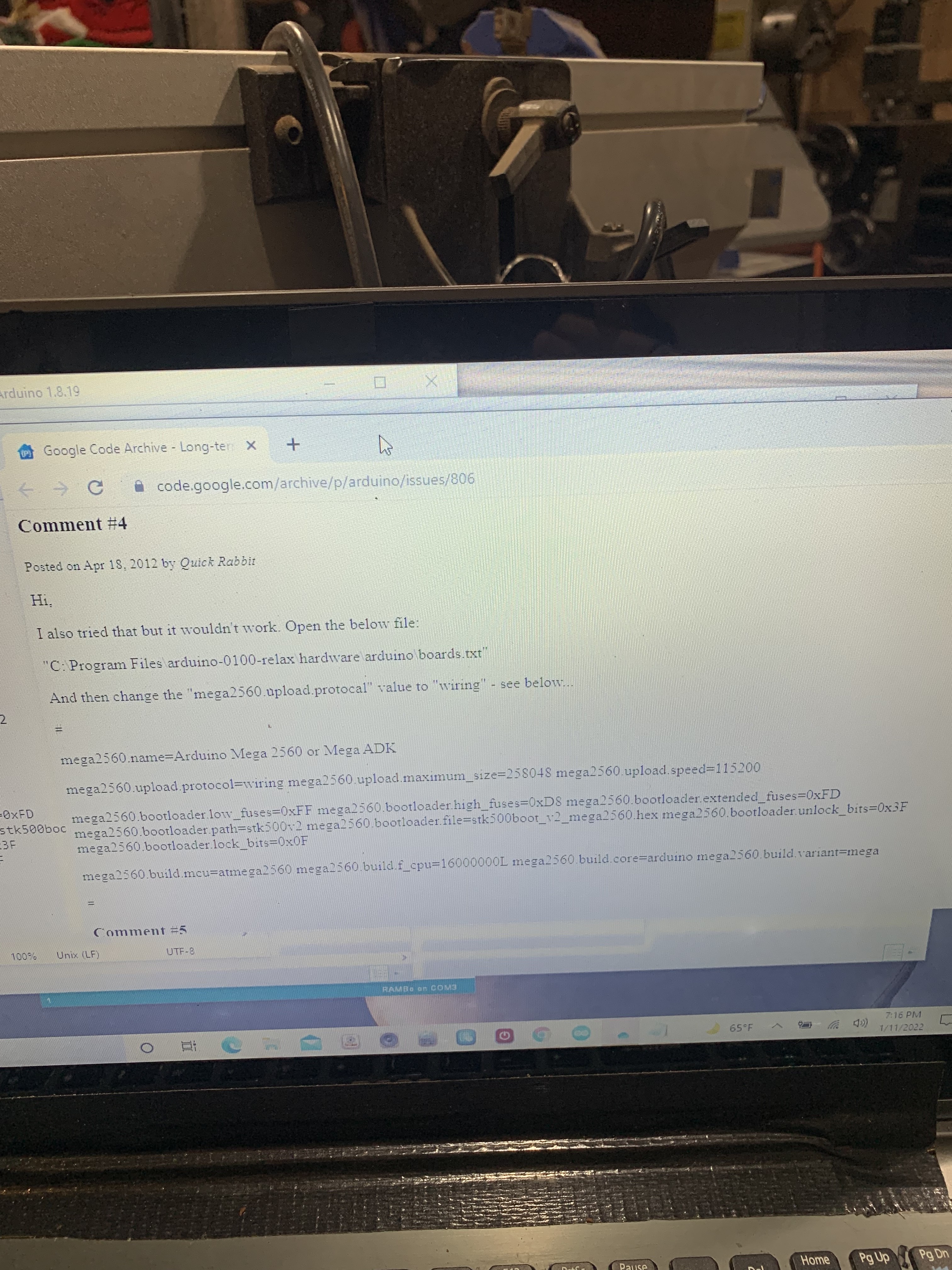
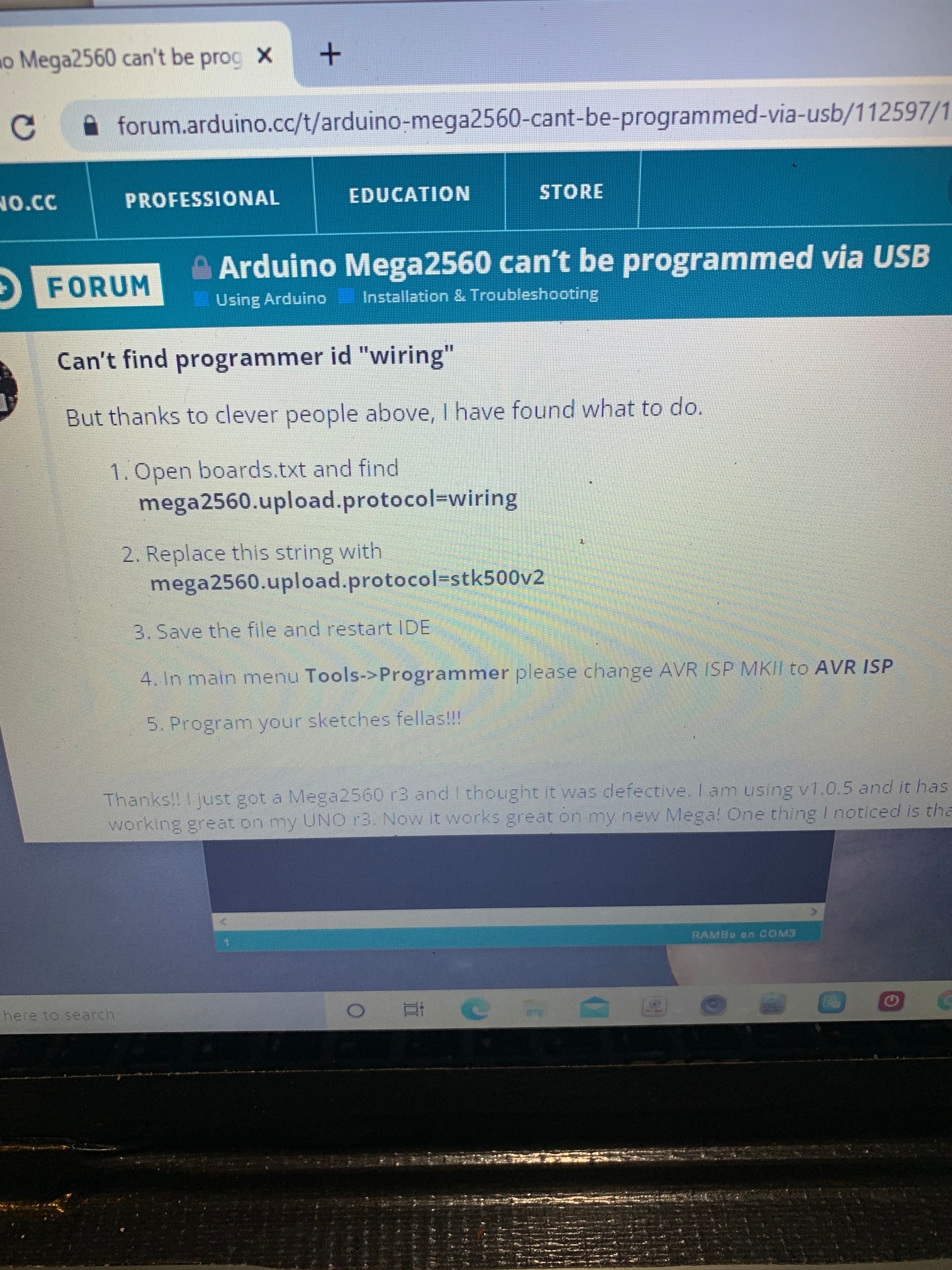
My board.txt file was wiring. I changed it to stk500v2 but I am still getting timeout error. Are the light suppose to be flashing on my board while uploading? Because they are not.
Ok. Quick update. I installed a driver called 3D printer powered by RAMBo and then uploaded grbl and this time it was successful. I also tried connecting to UGS. This time when I selected the setup wizard I got a confirmation saying Connected to Grbl 1.1k. So that means flashing grbl worked right?
So now even thou it shows connected I can’t control the machine. There’s an alarm that says s probe hold. Could that be why?
1 Like
Generally grbl starts in a “ hold” for safety. You need to take an action - unlock or home the machine- before other controls are active. If you don’t have end stops you’ll probably just unlock. If I remember correctly there’s a UGS keyboard shortcut to unlock. Maybe control-x?
I am trying to do the setup wizard and even thou it shows connected. One of the steps is to test that the wires are connected correctly. But no matter which directly I try to move. It doesn’t move. I have disabled the soft and hard limit switches. As well as the homing cycle. The only alarm currently showing is the z probe hold. Which I tried to find to disable but couldn’t.
Is there a dedicated plug I can use for a z probe on the Rambo board?
Oh yay. I am glad you figured it out. Do you have windows 7 by chance? I haven’t seen anyone needing a driver for a long time.
Windows 10. Solved one problem. Ran into another. Even thou it’s connected I can’t seem to jog the machine in any direction. I have an alarm showing z probe hold. But I don’t have a z probe installed. I’m not even sure if the Rambo board has a place for it. I read somewhere they use the z min limit switch for a z probe but I think UGS needs to have a z limit switch installed to home properly.
UGS doesn’t care. Or at least it shouldn’t
GRBL is returning the alarm, and you can test this by connecting with a simple terminal. (I use Putty)
Some things that I remember…
- $5=? – Invert limit switch pins. 0 for Normally Open switches, 1 for Normally closed. (With reference to GROUND.
- $10=? – This reports status. It’s a combination value, add the values for the things you want a report on. 1=Machine Position, 2=Work position, 4 and 8 are buffer status, 16=Limit Switches.
$10=17is the one I use to give me the machine position and switch status. - $21=? – Hard Limits Enable. This looks for triggered switches, and if they ARE, stop the machine. This sounds like what you’re getting. I don’t remember if 0 or 1 disables this.
- $22=? – Homing sequence Disable. If this is enabled, a homing sequence must be run, or else nothing else is accepted. Pretty sure that 0 is off.
I think that if you turn off the homing sequence and the hard limits, your machine will move OK.
I did disable the limit switches both hard and soft and the home cycle. But still no movement.
Results from $10=16 Based on your statement that it’s saying there’s a stop on the Z probe, then this should tell you what the Z probe value is, and you can start chasing it from there. Maybe put a jumper on the Z_MIN between signal and ground if you’re not using a probe (Though this should actually make it triggered for a Normally Closed switch, we usually use the Z probe Normally Open, but most of our switches are usually Normally Closed.)
While we’re at it, it’s worth double checking that you have motor power connected (There are 2 sets of 12/24V inputs needed) and that you have not blown any of the fuses, The big 15A ATO fuse isn’t one of the ones we’re concerned with. The F2 motor fuse is along the edge next to the motor power connector. You want to be sure that you get good connectivity between the 2 sides of the fuse. The F3 fuse (next to the power connectors) is good if you’re able to power up the board and talk to it via the serial connection. The F4 fuse (The 15A ATO fuse) is for a heated bed, and we don’t care about it for CNC work.
Hello,
It has been a while but I just wanted give an update on what’s going on. So I purchased a separate board with grbl 0.9j and I was able to connect to easel and UGS but for some reason I can not jog the machine. The board came with a small offline controller and I am able to move everything around with that so I I don’t think it’s the wiring. But when I try to jog the machine in easel and UGS nothing happens. Can anyone help me? I read somewhere that grbl 0.9 had issues. If so would anyone know how I can update to 1.1? Thank you.
I suggest going to the source (github) for upgrade instructions. Basically, you’ll download the new source files, make any changes to the config file, compile, and flash to the board.
Before jumping to a new version, are there selections in UGS and/or Easel for the type of firmware being used, and/or the COM port to which the controller is connected? Those both need to be right in order for controller to send the right commands, and for them to actually reach the board.
Thanks to everyone for all the help. I was able to get it going. Thanks again.