MPCNC is not a coreXY machine. I think you have the wrong firmware for an MPCNC build. I would think you want one of these…
someone will be along shortly to advise you which one…
Did you use Arduino IDE to flash your Mega2560 or did you use the pre-compiled firmware.hex file and Xloader? I looked at the V1CNC_Ramps_Dual-2.0.7.2-src.zip and the relevant section of configuration.h is correct for a MPCNC as in all the core XY machine options are commented out -
// @section machine
// Enable one of the options below for CoreXY, CoreXZ, or CoreYZ kinematics,
// either in the usual order or reversed
//#define COREXY
//#define COREXZ
//#define COREYZ
//#define COREYX
//#define COREZX
//#define COREZY
//#define MARKFORGED_XY // MarkForged. See https://reprap.org/forum/read.php?152,504042
However, without loading the firmware.hex directly I cannot verify that firmware.hex is correct.
You may need to look a little deeper into this, the direction of rotation is set by the signal on the DIR pin on the DRV8825…got an oscilloscope?. you also might want to send the relevant gcode directly to remove the screen from the equation, connect your Mega2560 to your USB and use a gcode sender to send G1X10 and G1X-10 to see if it reliably follows your commands. (you will need to set the rate first try G0F1000. ) Other than that your feed rate looks quite high from your video, you could try slowing it down for testing purposes…
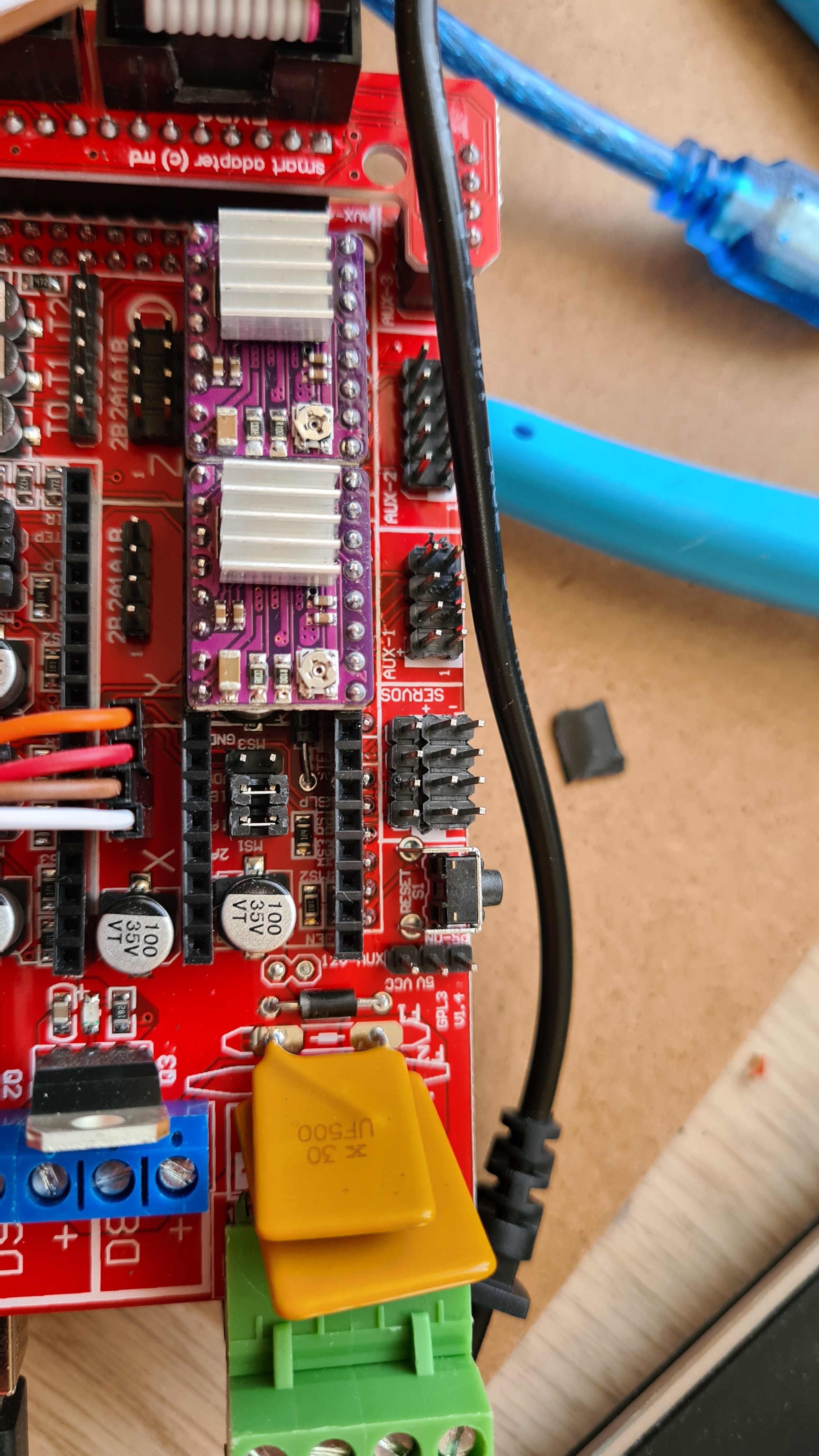
Are you sue that you have the motor wires connected properly? I see that you have a bunch of 1 pin connectors instead of a single 4 pin header, so you might have the pins mixed up.
The motor will have 2 coils, so there will be no connectivity across the pairs. Polarity shouldn’t matter, but the RAMPS board is wired A, A’, B’, B. If you have the coils mixed up, it can still turn, but do some weird stuff.
It can also do some weird stuff if the driver amperage is set too high or too low, so you should verify that you have appropriate current set on your stepper driver.
1 wire had come loose. So it worked with 1 coil only. Connected the wire, but no change.
I will wait for the right motors to arrive. Then I will fix the Vref according the motors and put the jumpers on the right locations. The current jumper position does not work (all jumpers in)
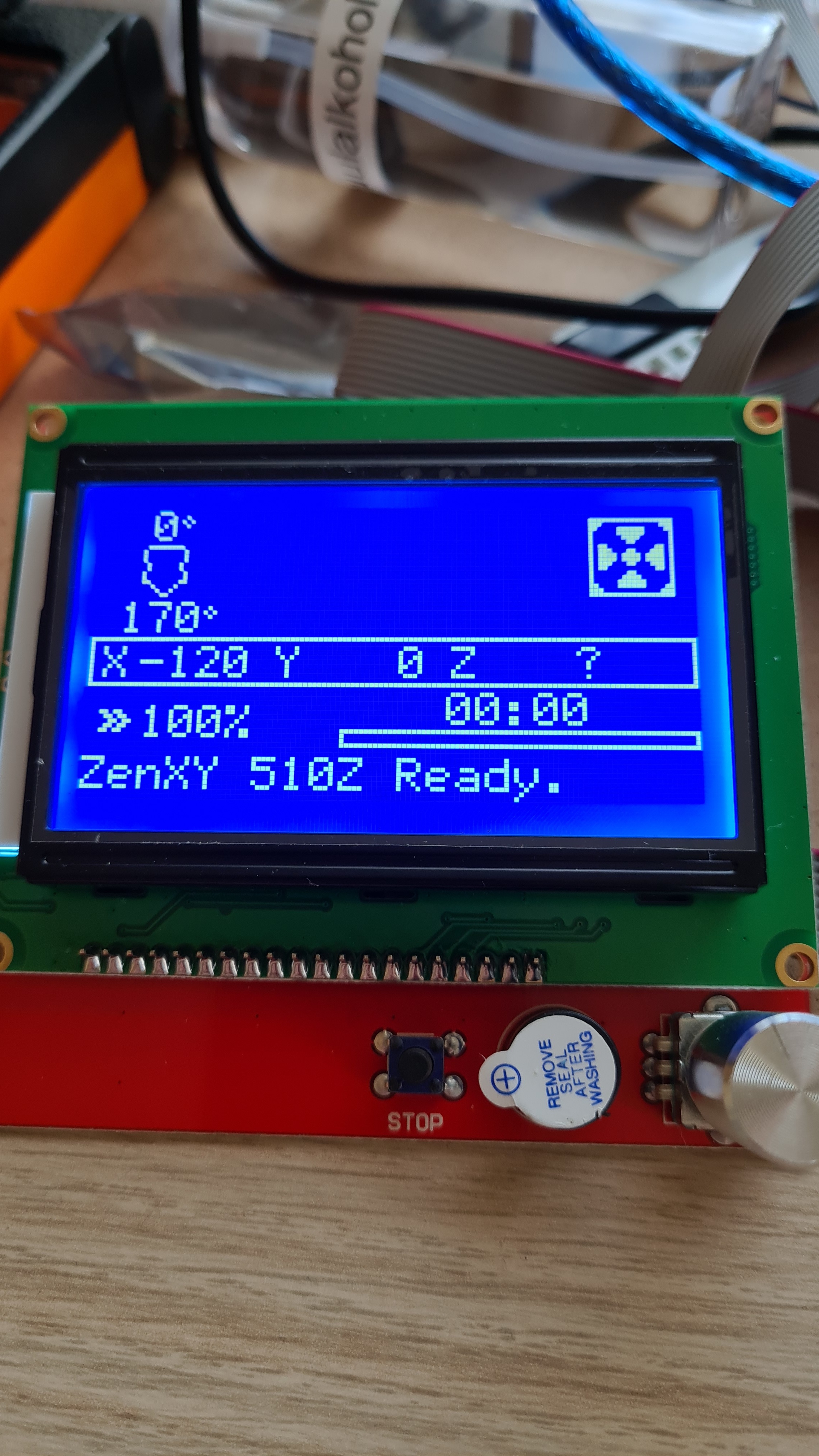
The first behavior makes sense. The zxy firmware moves both motors to move X or Y. It should say 510D if you installed the middle one properly, and it should not say Zenxy.
The second video doesn’t make sense. Hopefully proper wiring will fix it.