Hi,
I’ve got a persistent issue with my z-stepper motors. They can’t lift the router. If I position the router half way along the Y-axis, no problem. Position the router at either extremity of the Y-axis, and the weight bearing stepper just skips.
Troubleshooting so far:
First, I checked for free movement at both Y-plates with the coupler removed. Free and easy movement.
Second, connected the couplers to the motors, but no power. Free and easy movement.
Third, chacked no physical impediments, snagging etc. None.
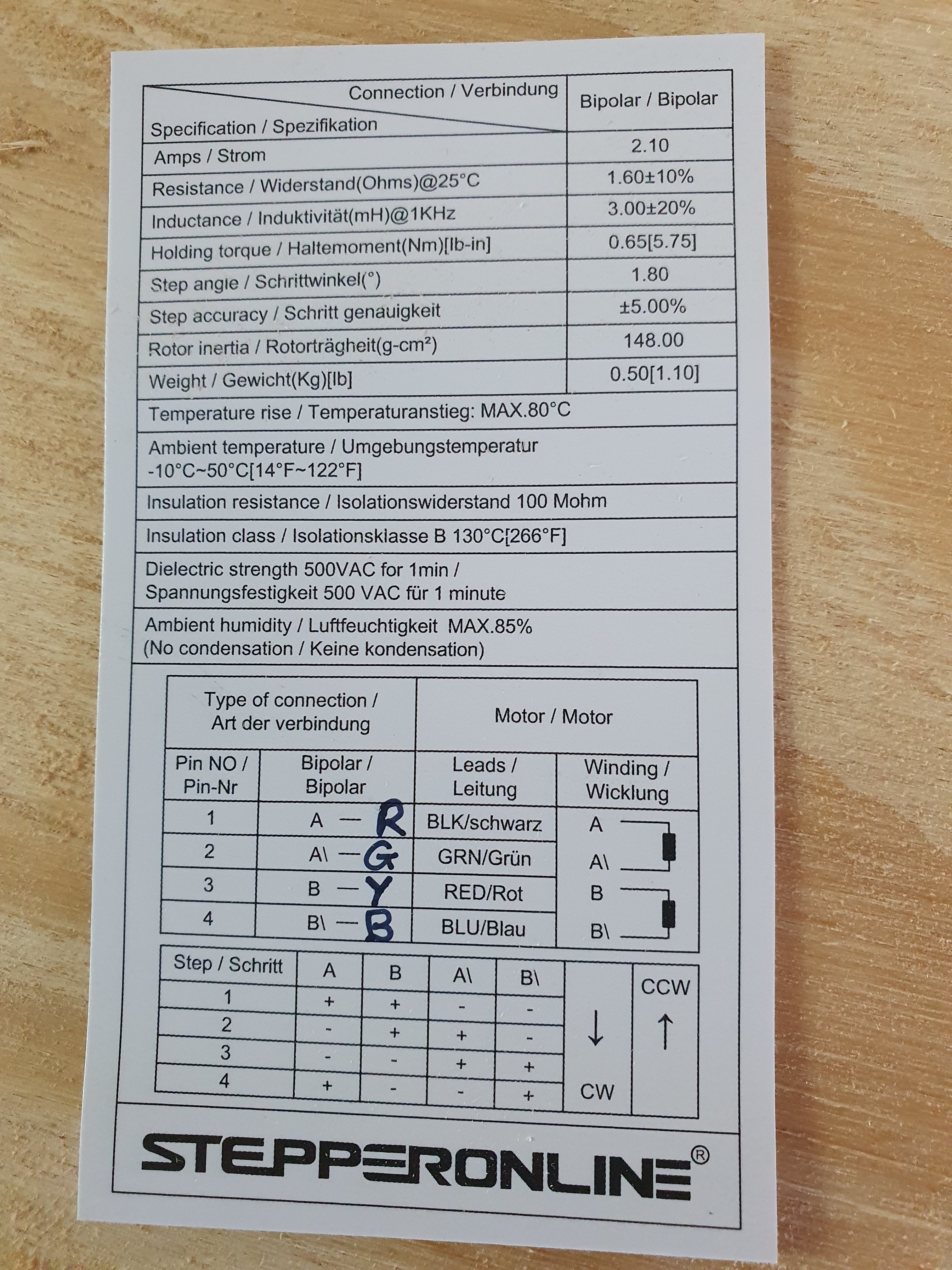
Fourth, fitted two new NEMA17 high torque ( 92 in/lbs) steppers. No change.
So now I’m thinking this is either a cabling issue or a firmware issue. The cabling is from Ryan. Connected as per instructions, and all directions etc work as advertised.
Firmware? I seem to recall someone else talking about this issue, and he solved it via firmware fixes, but I cant now find his post.
Any help will gratefully be accepted.
My final avenue is to use Nema23 stepper motors for the Z-axis, but I know this involves all sorts of stuff I don’t know anything about.
Unless you have a non-standard, really heavy router, you should’t need Nema23 steppers. Having in run in the middle but not on the edges feels like a mechanical or cabling issue. Check the grub screws on the coupler. Run out on the Y until you have a problem, release the steppers (M18), then turn the lead screw by hand and see if it is binding. You can compare the turn difficulty to how if feels when the router is in the middle. Release the end of wire chain where your Z axis runs and manipulate the chain by hand while running the Z axis up and down in the middle.
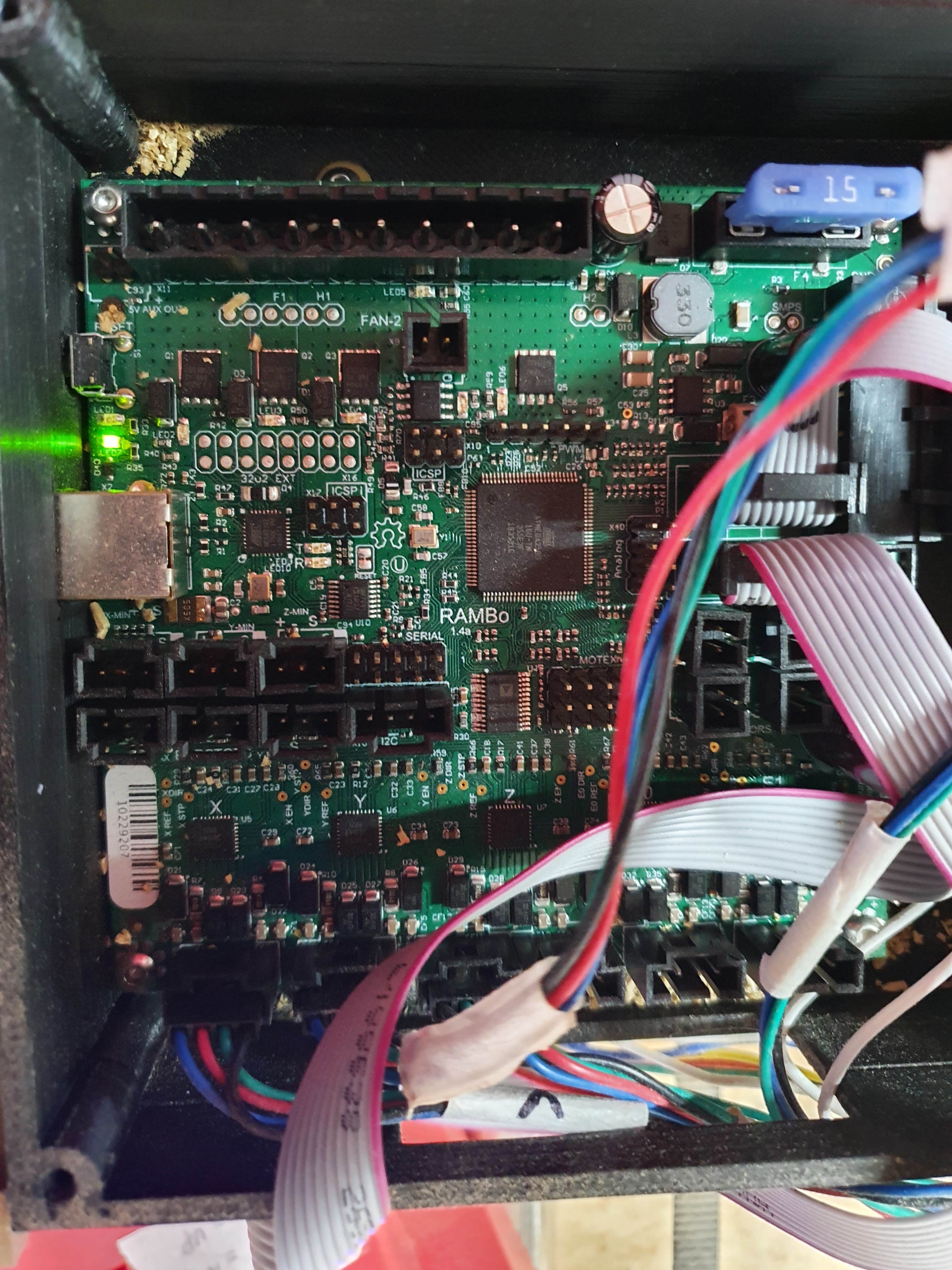
Ahh, OK. This might be your problem all along. What kind of controller board are you using? Also, what stepper drivers are you using? Board= SKR, RAMPS, etc. Drivers= A4988, DRV8825, TMC22xx, etc.
Edit: Pictures would be best!
Also, could you post a link to the new stepper motors you bought?
Sorry man, Rambo board has stepper current configuration in the firmware. Not familiar with that. I’ve only dealt with stepper drivers with manual adjustments. My guess is that’s where your problem may lie. Both steppers can lift the gantry, but when most of the weight is shouldered by just one of them, there isn’t enough current, so it skips.
Hi. Thanks. Surely I can’t be the only one with this issue? The gantry is at the extremes a lot of the time. Let me take a look at the configuration files and see if anything stands out.
Hi again,
As a complete novice when it comes to electronics, boards, configs etc, it would make life a LOT easier if someone could give me a step-by=step on how to check/ verify the current to the stepper motors. I understand each individual word, but together in a sentence they make no sense to me at all.
SOLVED!
I re-flashed the firmware, with the following settings: #define DIGIPOT_MOTOR_CURRENT { 138,138,220,138,138 }
Now even firm downward pressure on the router in its extreme Y-travel position doesn’t fase it. Easily lifts without skipping. All I have to do now is to monitor stepper motor temp, and reduce the current if necessary.
Yeah. That number is going to make a lot of heat. The steopers and the drivers can overheat. Too much heat on the motors can make the plastic soft, and the motor mounts will sag. Too much heat on the drivers and they will just shut off, for a few minutes, to cool down.
The rule of thumb Ryan uses is 50C on the motors. If you stay below that, you will be ok. I don’t know how far above that you can go before you have trouble. 220 from 138 is a huge change. Smaller changes like 140, 145, etc. Would be where I would start. Make sure to save those changes with M500 or you will lose those on a reboot. The heat is nearly the same when they are moving and stationary. A lot of people don’t know that.
There should be plenty of power at the standard settings. Like you said, you can’t be the only one to have this problem. I just don’t know what the issue could be. The leadscrews can bind up if you don’t lube them, or the nuts are too tight and they bind up.
It’s really hard to use your hands as a test. People have wildly different opinions on how strong the motors need to be. They have to lift the router and gantry while milling. They don’t have to overpower a grown man. I trust you are doing your best to get a feel for the strength, and I trust you are having a real issue. I am just cautioning that blasting them with current to meet high expectations might be hurting more than helping. YMMV.
Hi Jeff, and thanks for the feedback.
I reduced my Z current to 150, and the bloody Z-steppers start clacking at the slightest provocation. So I’ve boosted it to 180. (I got the original 220 setting from some guy’s post on one of the CNC forums, so figured it was a place to start…) Tested 180 with added weights. It will now lift the router and 1kg of nuts and bolts in a plastic container. So I’ll continue to play with this. But heat is my enemy now. Might have to fit cooling fins…
Duncan
Duncan, I had the same problem when I switched from a RAMPS board where I had to set the power manually to the Mini RAMBO. In the current version of the RAMBO firmware, there is an option to increase the power of the steppers via the LCD screen without the need to reflash. It changes them ALL, so beware of that. I wouldnt go higher then needed. I beleive it is under the advanced menu. I had issues with both my Dual motor axis until I turned it up a bit.
J’ai rencontré un problème similaire sur ma lowrider.
J’ai résolu le problème en changeant l’épaisseur des platines en bois sur le côté. Le bois était trop flexible et quand tout le poid de la Dewalt était d’un côté dès que le portique montait le bois se déformait et pinçait les tubes et rajoutait des force de frottement au point que les moteurs ne pouvaient plus soulever le portique.
Il m’a fallut un bon moment avant de comprendre mon problème. Si vous avez un problème similaire j’espère avoir pu vu aider.
Google translate :
Hello,
I encountered a similar problem on my lowrider.
I solved the problem by changing the thickness of the wooden decks on the side. The wood was too flexible and when the full weight of the Dewalt was on one side as soon as the gantry was going up the wood warped and pinched the tubes and added frictional forces to the point that the motors could no longer lift the gantry.
It took me a long time to figure out my problem. If you have a similar problem I hope I have seen help.
Dear Abby:
Hey Jeff. I was just reading this thread since I am having the same problem as Duncan was having, however my electronics are different than his. I am using the SKR Pro with TCM2208 drivers. I’m having a hard time understanding how to increase the current to my Z motors since I don’t know the syntax to use when addressing Z1 and Z2. Am I right to assume that M907 Z150 would set the current of Z1? If so, then how do I set the current for Z2? Z2 is connected to the E1 driver but M907 E1150 looks scary! like it could be interpreted as 1150 not 150… I’m confused.
I parsed through the configuration_adv.h file where it addresses motor currents using Digipot and pwm stuff but was unable to see any reference to my drivers???
Signed… Stumped :-/
You should open your own topic. There are a lot of details we will want to know, and even though the symptom looks the same, the cause may be completely different.
TMC drivers use M906 and they have a special syntax for indexing Z2: M906 I1 Z800. I0 is Z1. And the M906 version is in mA, so different values than M907.