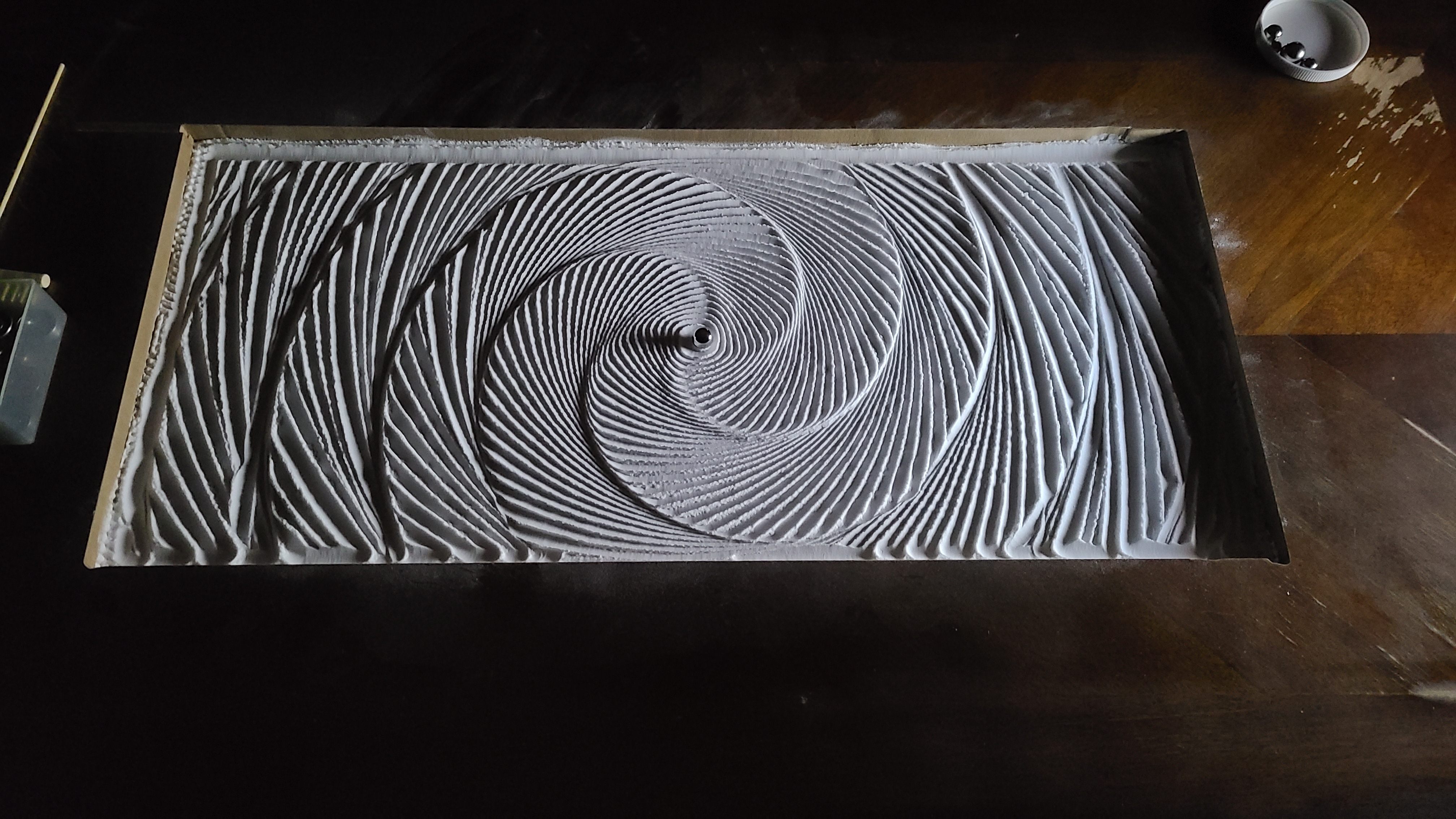
Another test with the 1/2" ball. Just waiting for the new electronics to arrive so I can untether from the laptop. Although, it does add a nice lighting effect.
2 Likes
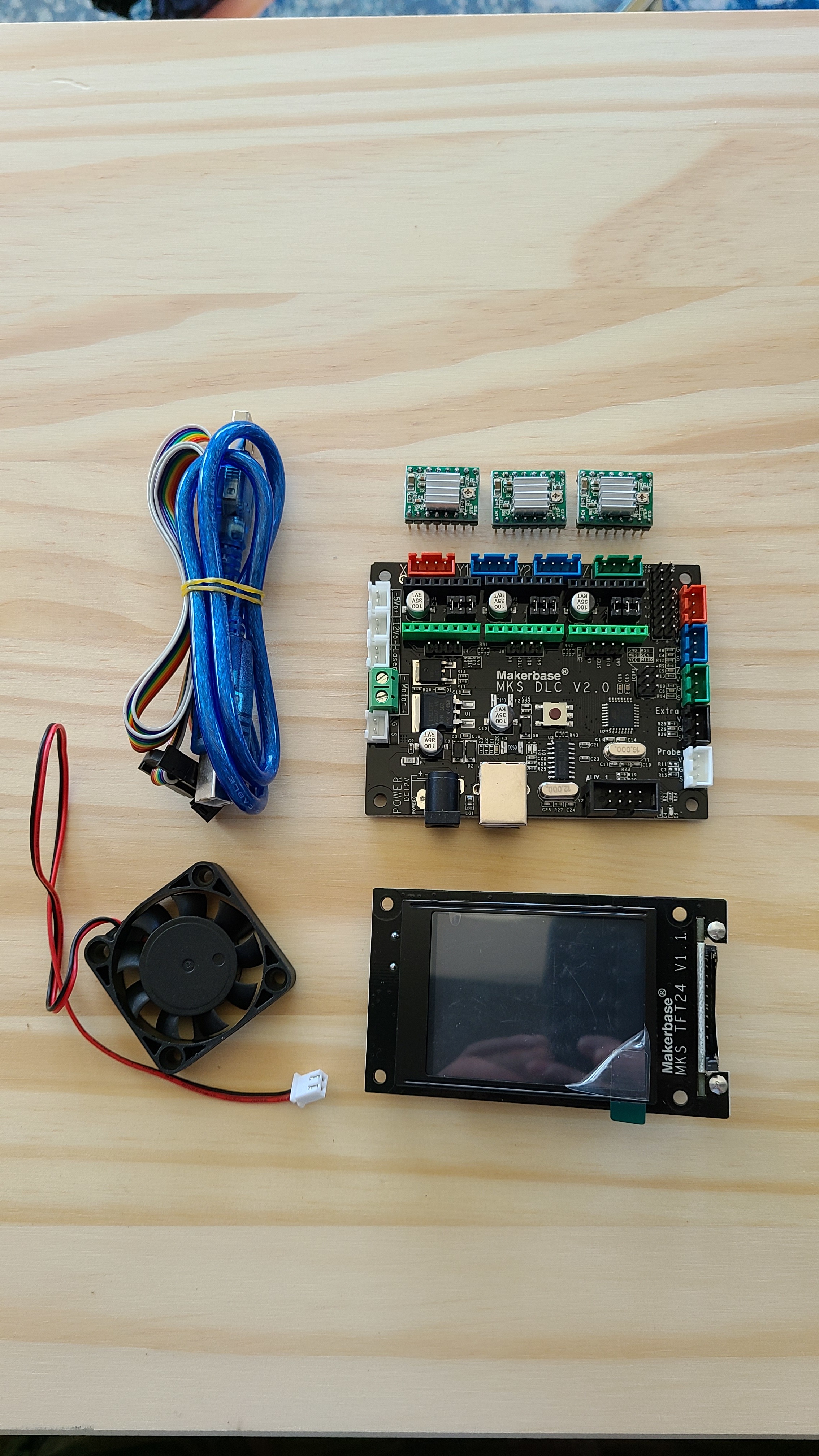
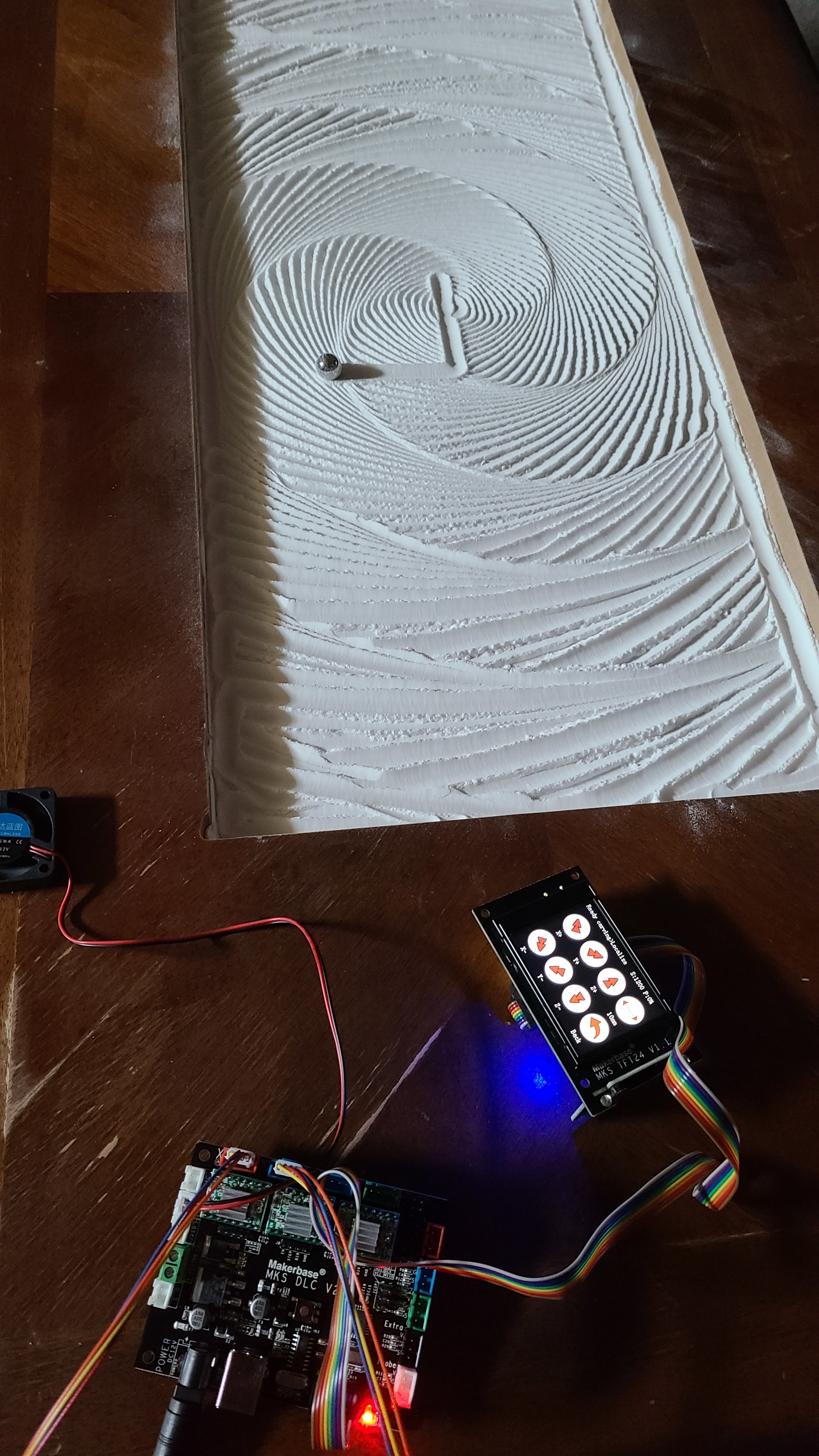
Well, already had a grbl config for the uno/cnc shield setup for CoreXY and just pushed it to the MKS and viola, it works!
1 Like
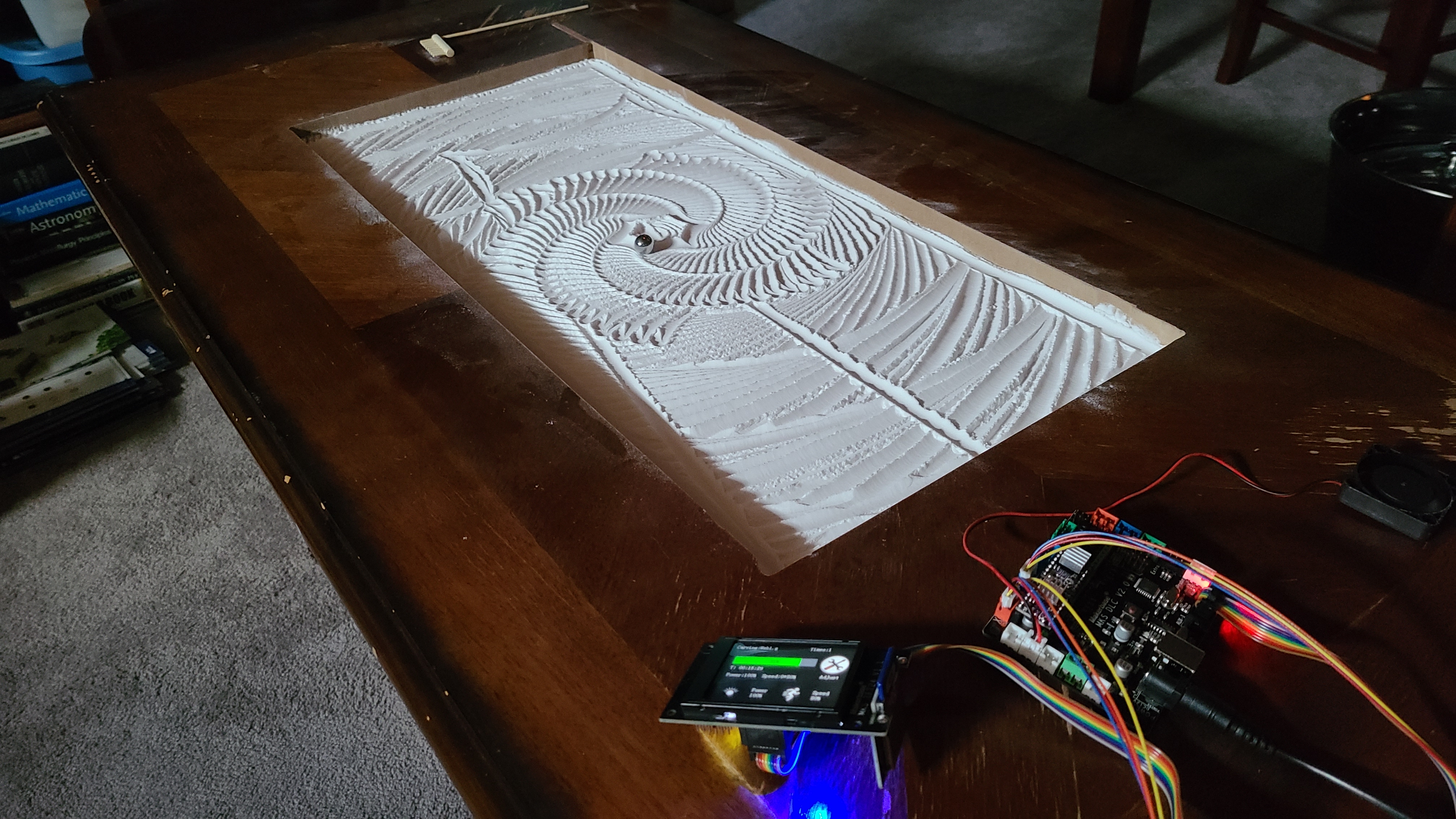
Had to plug into a pc to adjust some of the firmware values via UGS, but here’s a print from the SD card. The middle bit anyway.
1 Like
Had some black aluminum L channel leftover from another project. Finished the center out pretty nice I think.


It hides my sketchy router skills well anyway😜
5 Likes
Playing with Octoprint. Works well with GRBL after loading the “better grbl support” plugin and adding M503 to the blocked commands. This was throwing an error and disconnecting when octoprint tried to connect. Gotta shorten my pipes and get the homing switches working. Re-homing manually is getting old. Still working on function before form.
Still working on function before form.
1 Like
Ended up getting some TMC2208 drivers for this and another project. WOW!  The loudest thing now is the chatter of the ball moving through the sand. Now, I did have to turn the feed rate down from 6000mm/min to 3000mm/min, because of the stealthchop torque loss, but DAMN! it’s quiet.
The loudest thing now is the chatter of the ball moving through the sand. Now, I did have to turn the feed rate down from 6000mm/min to 3000mm/min, because of the stealthchop torque loss, but DAMN! it’s quiet. Huge improvement over the DRV8825s I was using originally. I just halved it to see if larger cuts were needed, so I’ll probably slowly ramp the feed back up to find the sweet spot.
Huge improvement over the DRV8825s I was using originally. I just halved it to see if larger cuts were needed, so I’ll probably slowly ramp the feed back up to find the sweet spot.
3 Likes
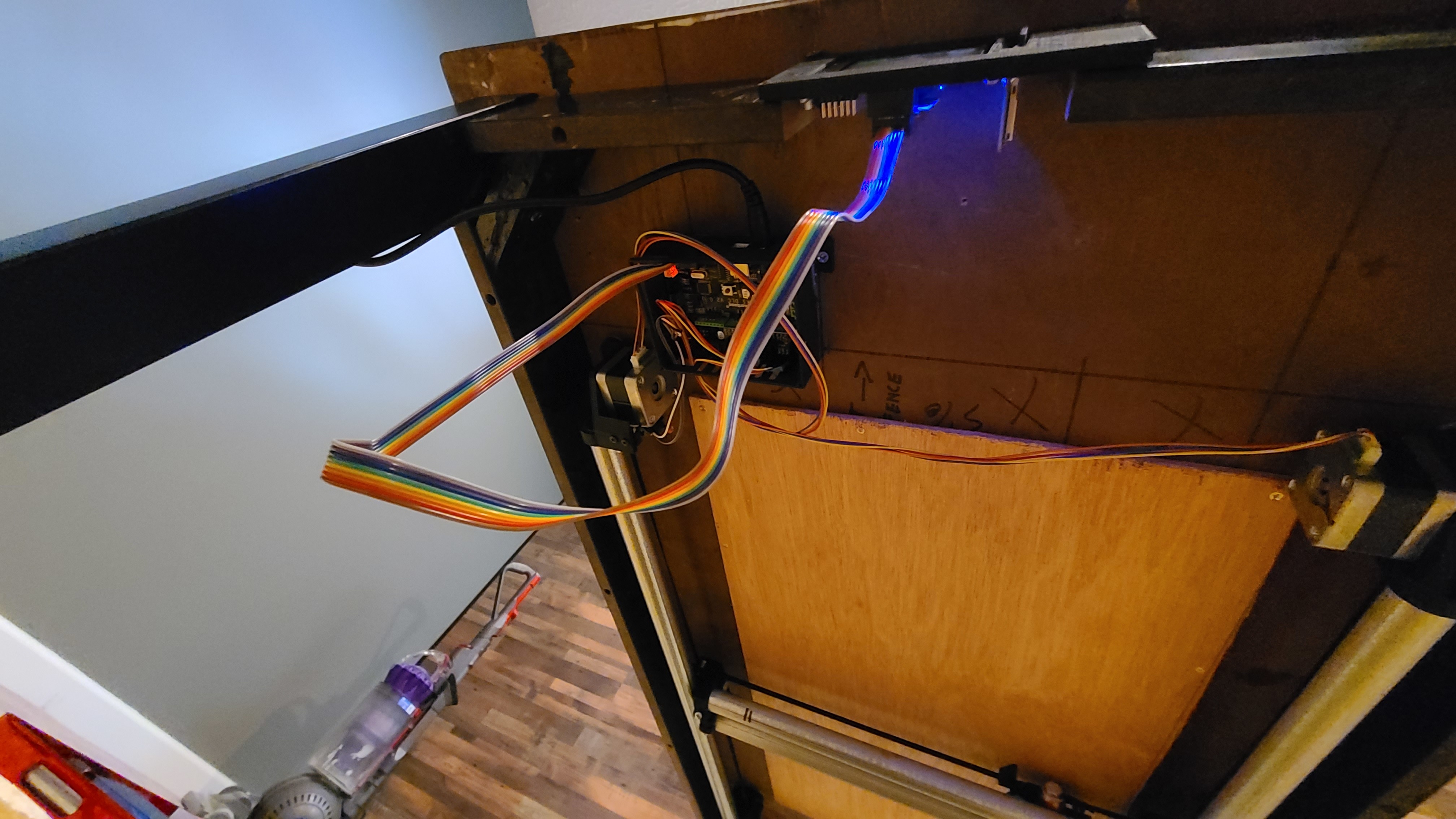
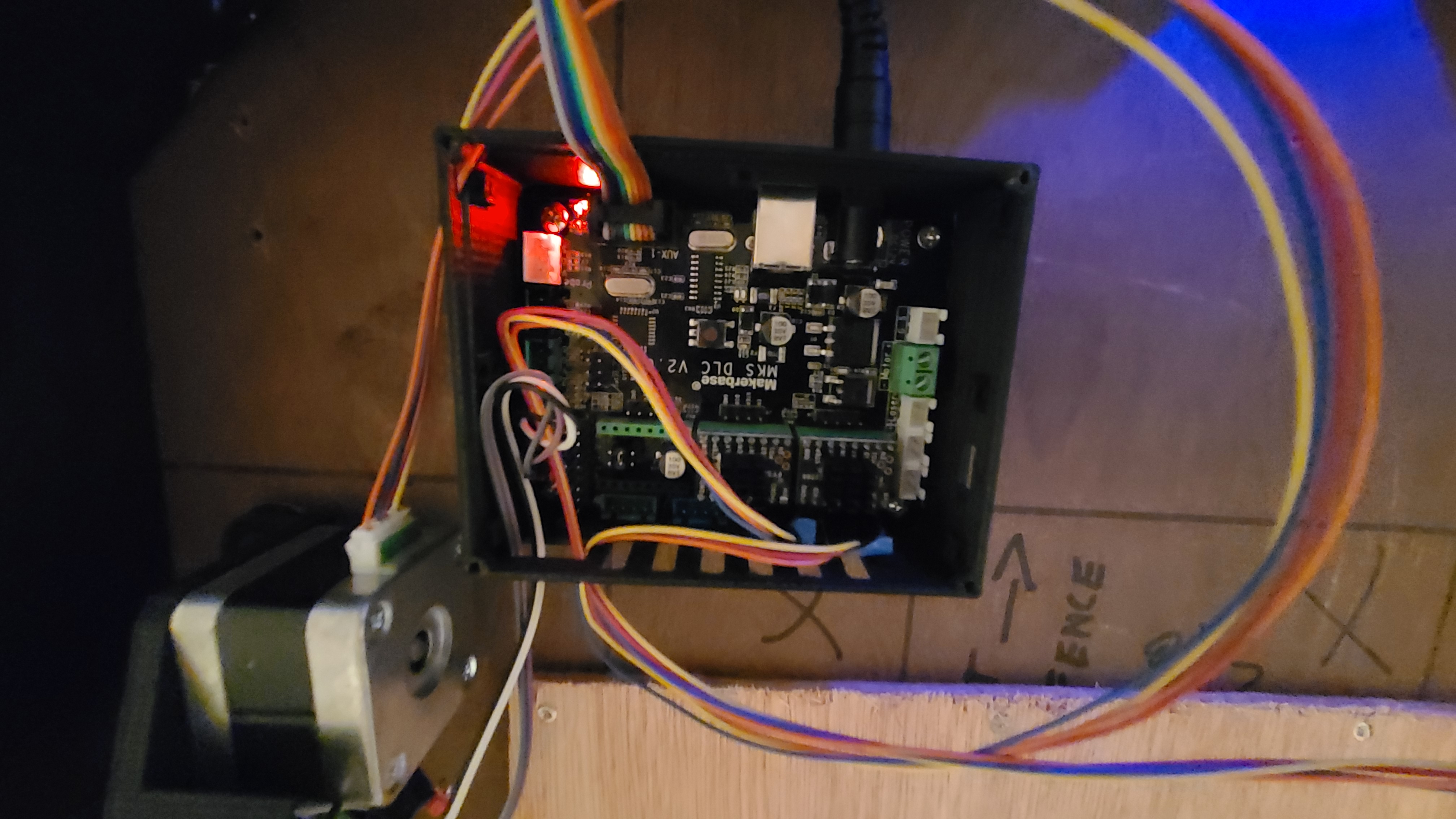
OK. Vacuumed the soda out, got the tubes cut down to size, as well as the belt, dumped the soda back in. Mounted the board enclosure and touchscreen. Still have to turn homing on in the firmware and test that. Then I’ll tidy up the wires, vacuum out all the soda again, finish the top (I’m thinking piano black), and get new soda. Should be good enough for the basement lounge area.

2 Likes
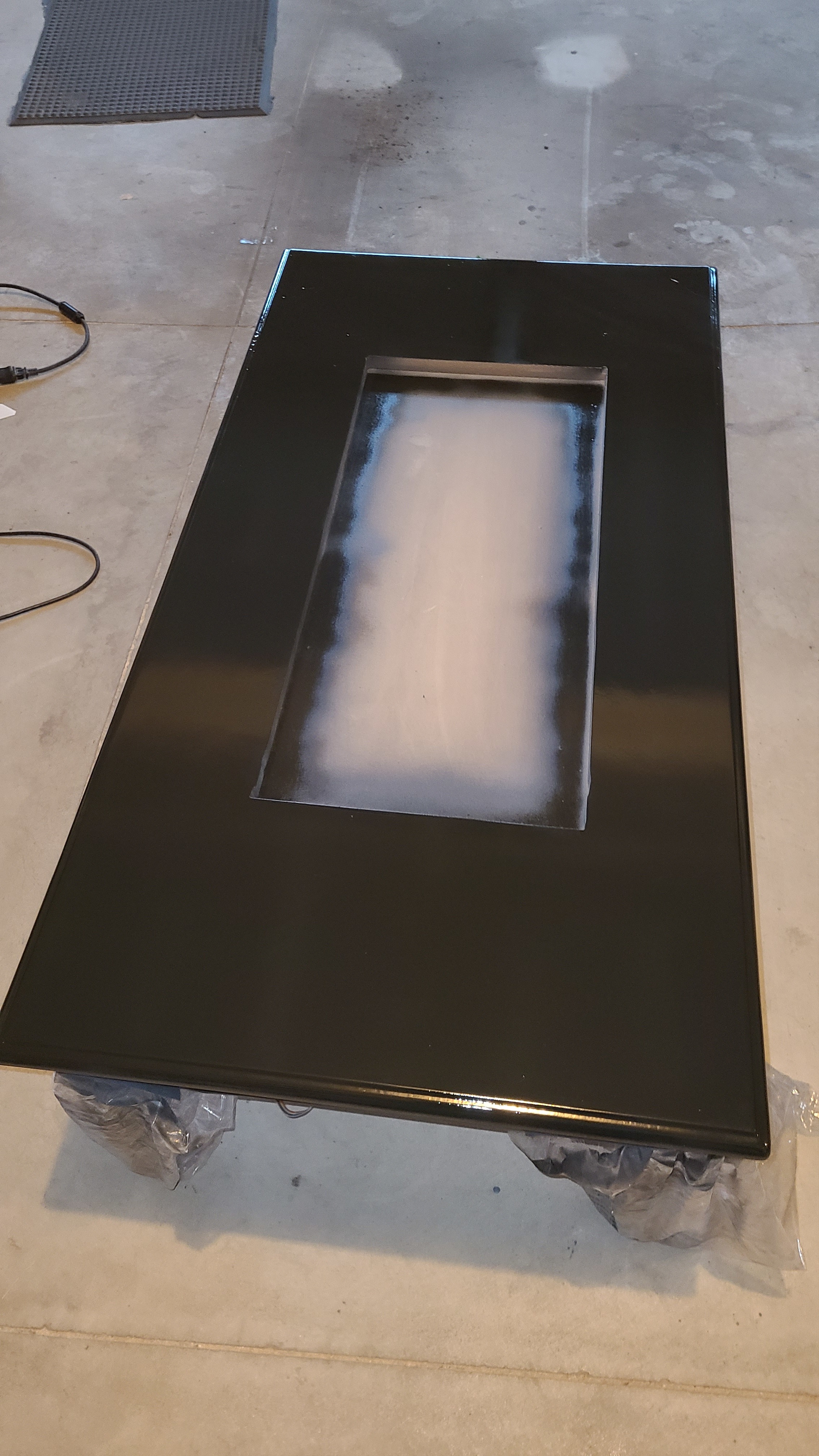
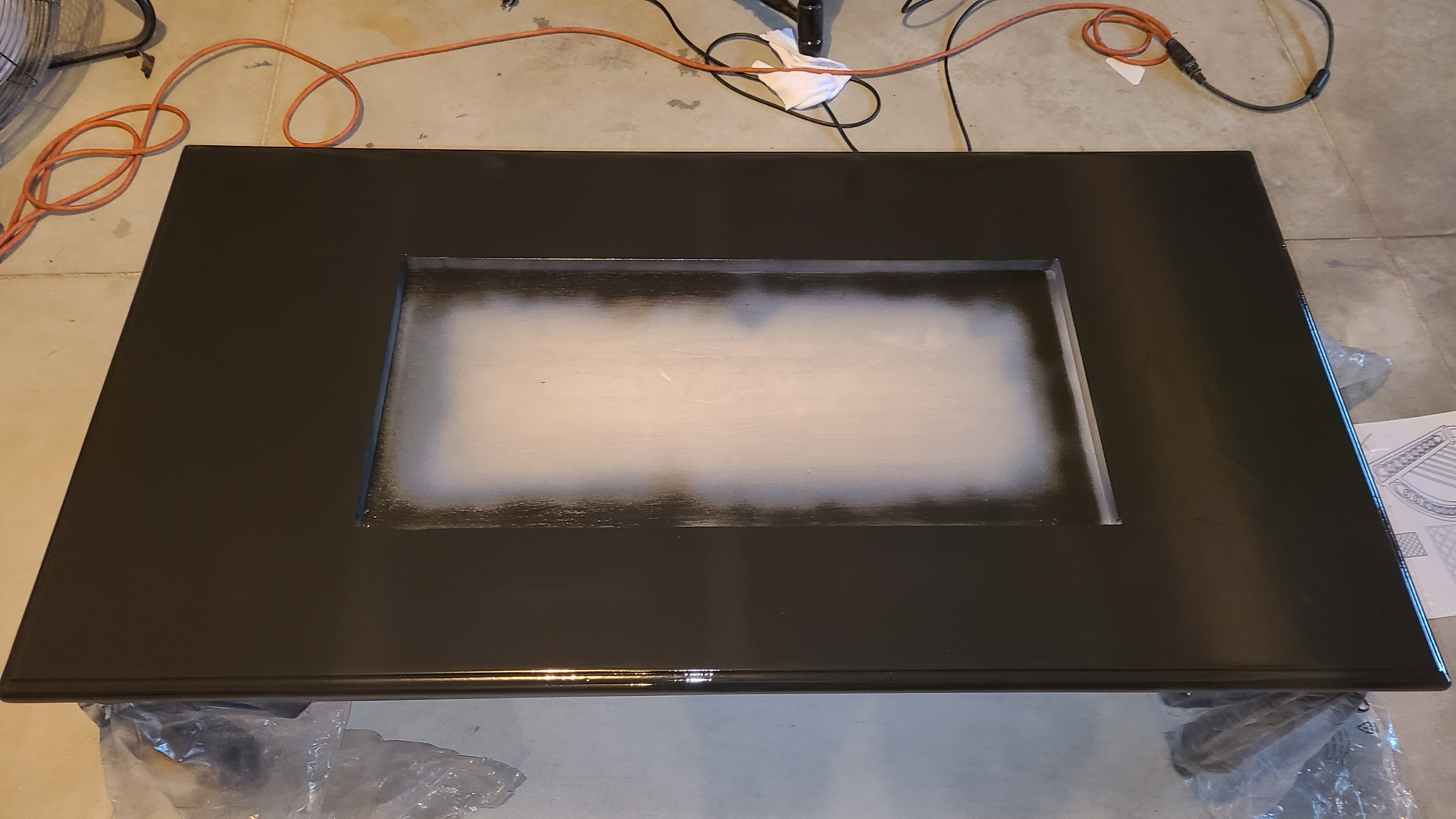
Finally got around to sanding and painting the top. 1 coat of primer, 2 coats of black and 3 coats of Krylon Clear Glaze 0500. Debating on whether or not to try and run over it with a polishing wheel and some Meguiars. I’ll probably just end up ruining it.
1 Like
I thought, “This stuff runs off 12 volts”, and “I’ve got a couple extra sealed batteries from an APC”, so I figured I’d put them together and see how it goes. It goes pret-ty well. Now I have to source a charging circuit. AliX has some for around $8 with shipping.
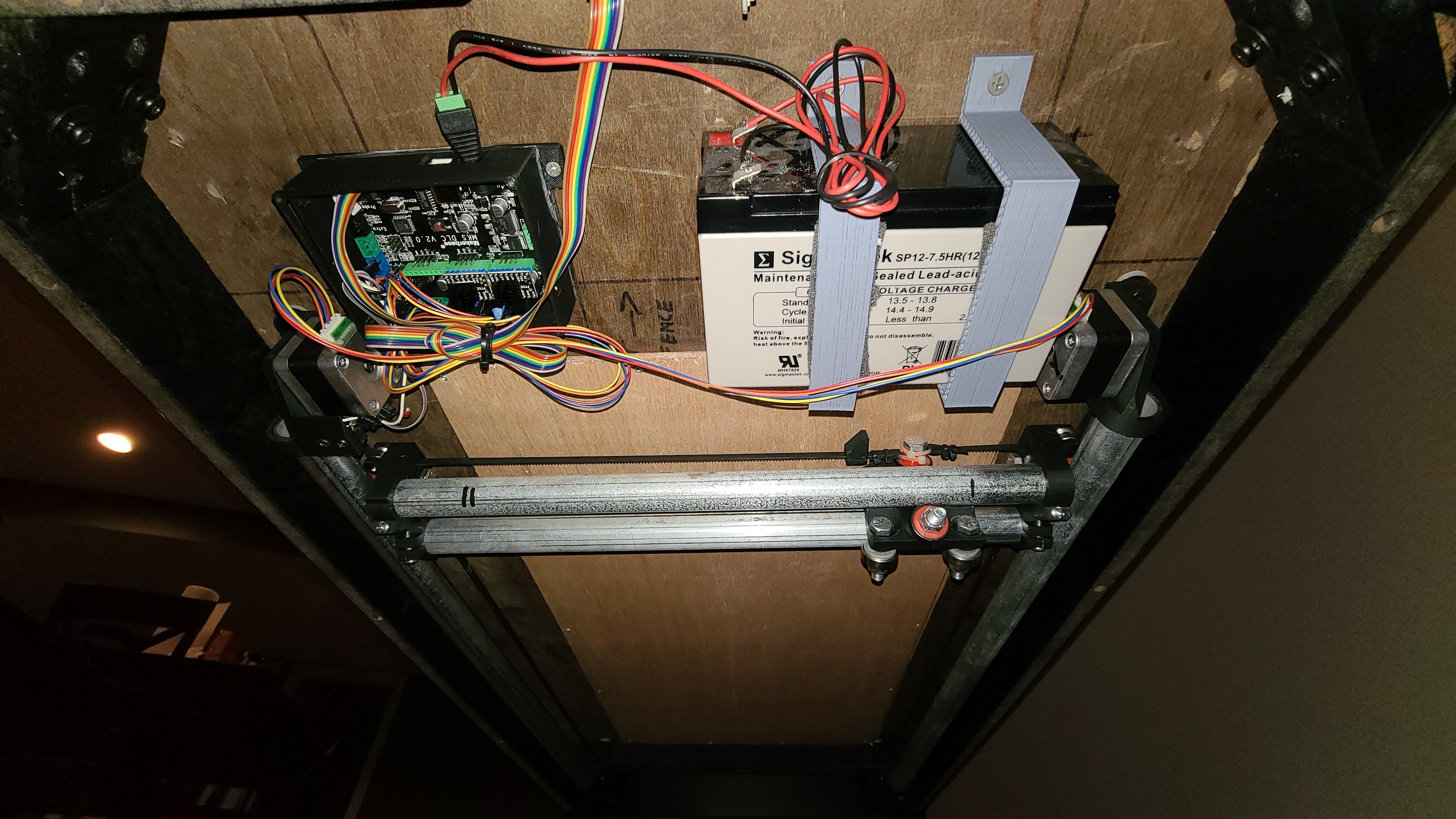
Fabbed some bracketry, and checked it with a ammeter, draws between .52 and .74 amps while in use, about .4 at idle.

Wireless!
1 Like
If you reduced the current on the drivers, it will drop even more. It sends about the same amps if it’s moving or sitting still.
But that’s still probably enormous battery life. Does the charge controller also turn it off when the batteries get low? I supposed it’s not as big of a deal with these batteries.
Probably not. Here’s what I was looking at.
https://m.aliexpress.com/item/4000375240910.html?spm=a2g0n.productlist.0.0.4e1a5ed1WvA9Gr
I’ll probably add a power switch between the battery and the controller as a physical cutoff.
The good news is, I think that would turn off the power when the battery was low, to protect the battery. The bad news is, it says it’s for a lithium battery, which will have a different cutoff voltage. Maybe you can adjust it? I also feel like there is a bunch of voodoo magic in the chemistry of batteries, and even though I don’t mess with any of that myself, I hope there isn’t enough of a difference to matter for your application.
This is all based on the assumption that the battery is a NiCd battery, or something. Maybe a sealed lead acid battery? Edit: It says right on it Lead-Acid
What I’m thinking about (and I might be paranoid more than helpful), is that when the battery starts out at 14V or whatever things will be humming along. As it loses charge it will drop a little, and a little more, and at some point it will cross the voltage that indicates a lithium battery is dead, and the charge controller will stop, and turn off the output. That’s good for lithium batteries. If you didn’t have the CC in the loop, and you had NiCd batteries, then they would just continue to drop. I don’t think you would notice anything going wrong until it reached 5V and the controller would reset. At that point, are the batteries damaged? I am pretty sure lithium batteries would be. But I don’t know much about NiCd or LA batteries to know if they are going to cause problems from over discharging.
And then when the CC is charging, is it pretty dumb, and just sends in a constant current until the idle voltage is at some voltage? The top voltage seems to be dependent on the lip chemistry too. So it probably stops at 4.2V/cell. Is it ok to charge NiCd batteries the same way as lithium batteries, with a constant current? I really don’t know.
If you can adjust the full voltage and the voltage cut off, then I think you’ll be ok. But it would be much better if you can find a charger for the chemistry of that battery. I’m sure they know more than I do about it.
Yeah, there was another vendor with the exact same controller that had a video that showed adjusting the high and low end voltages. So it would begin charging at X volts and stop at Z volts. I didn’t see anything about shut-off after dropping below a certain threshold when not attached to constant power source though.
After some more searching I ended up ordering this…
Seems to have all of the features, charge start, stop, and low voltage off. We’ll see, by 10/15, “Or full refund” 
2 Likes
I finally got the homing to work correctly. Man, what a pain. Here is the GRBL config.h.
config.h.zip (17.1 KB)
The real tricky part was the “#define HOMING_FORCE_SET_ORIGIN”. It would home, but it wouldn’t set “home” as 0,0, took me a while to figure that one out. Also disabled the HOMING_INIT_LOCK, and anything that might throw an alarm because I can’t unlock from the touchscreen yet. Inverted the limit pin mask to use NC switches. Enabled COREXY kinematics. Home Y before X, which is opposite what default GRBL COREXY homing does.
Here are the eeprom changes I made after GRBL flash to the board (some of them might be redundant from the config.h)
$22=1 (Enable homing cycle)
$23=3 (Invert X and Y homing direction, or 7 I suppose to invert all 3 axes)
$24=100 (Homing locate feed rate mm/min)
$25=1000 (Homing search rate mm/min)
$26=250 (homing switch debounce ms)
$27=2.000 (Homing pull off distance mm)
I always put a $H, and my feed rate Fxxxx, at the beginning of the Sandify gcode to home the machine before drawing. It makes it easier, plus the home command from the touchscreen doesn’t work right. Gotta look into that.
1 Like
 !
! 
Load up on the lysol!!!
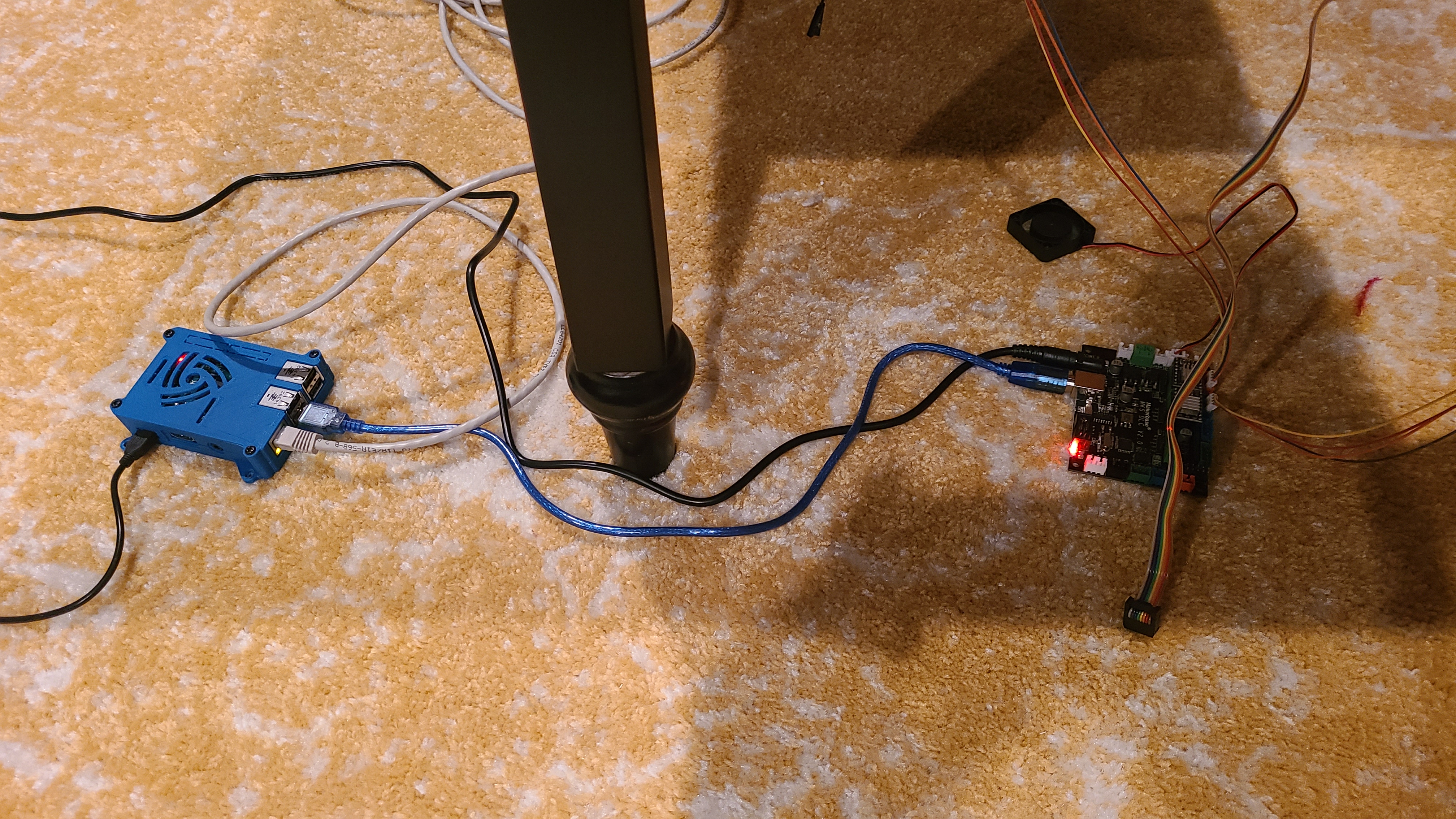
Still waiting for the charge controller, so feature creep is setting in hard. Added Octoprint via RPi-ZeroW, cuz you know, wireless, and a couple LED strips I had laying around. Added the Gledopto single channel zigbee controller I was sent by mistake from another project to dim the strips. They are RGB strips but I just have them each wired red and blue because I saw @mrehorst 's build video and liked the blue/red combo. Everything powered through the MKS_DLC board and the battery. All told pulling .51A max while running with LEDs at full brightness. (I must not have zero’d my meter when I took previous readings with the initial battery testing.) Although I do have the touchscreen disconnected now since it is pretty much unnecessary due to the Octoprint addition, so that probably accounts for it.


2 Likes
You might also want to check out sandipy:
Those leds look great.
1 Like