Time for a bit of progress update. Put in orders for a bunch of parts from amazon and what with the current COVID19 situation it was less than a smooth experience. Im pretty sure if I build a 3rd machine Ill probably just do a bulk order from the V1 store. At least then I can be confident all the parts will be correct and I wont end up with rolling suitcase wheels instead of proper roller blade wheels 
One large change was the color. I saw some high voltage orange filament on sale and couldn’t pass it up. Going to switch from a blue motif to an orange and black. 
This is where my first improvement over my MPCNC is. I used PETG for the MPCNC which is a fine filament. I decided to use PLA this time and the difference is incredible the PLA just works so much better. Its easier to print and get accurate parts and so far its plenty strong enough.
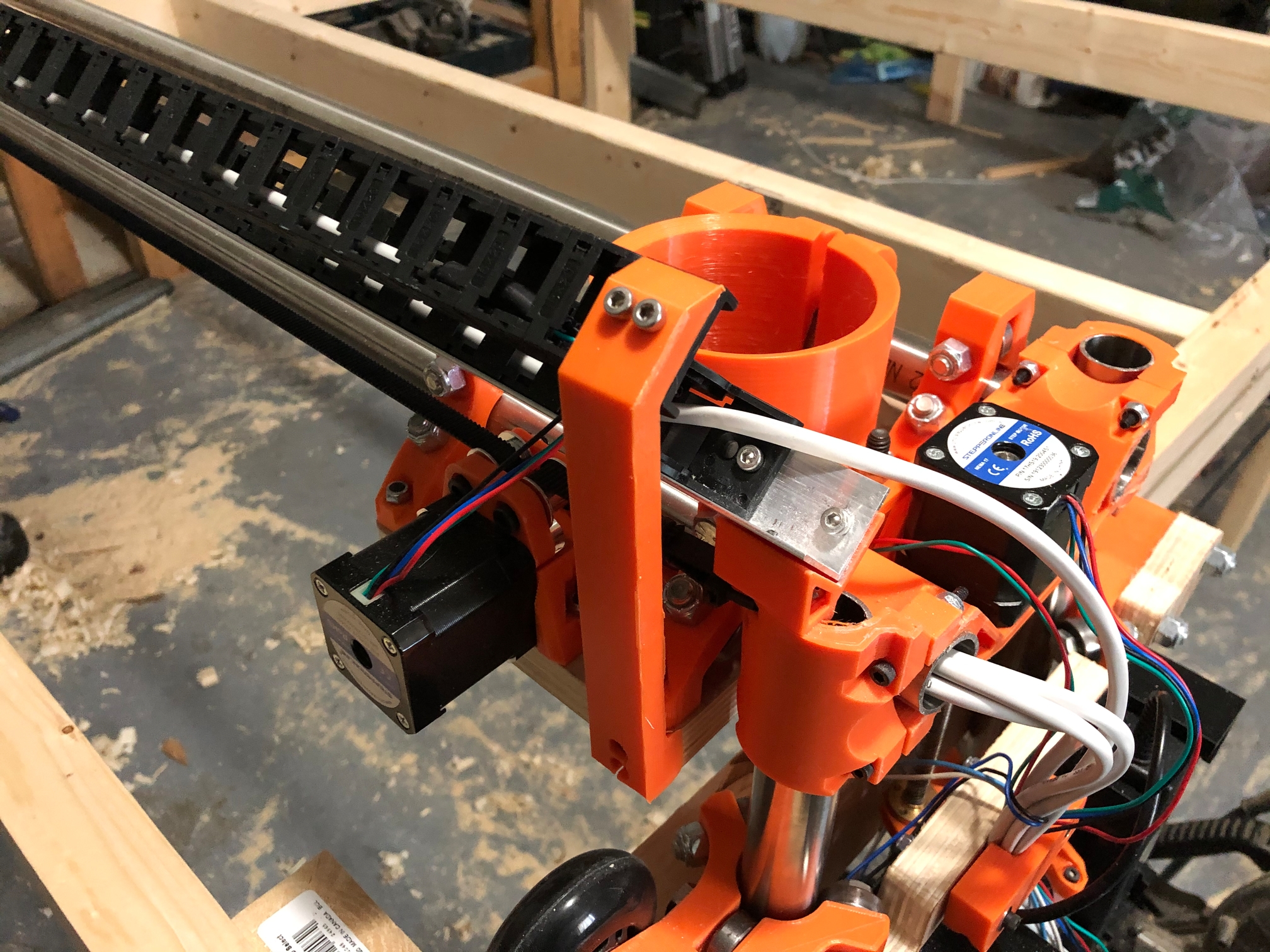
I made a few modifications, first of which being a mount for my very much too big router. Its the router I have so its the router ill use for now
Its about as stout as I could possibly make it. Having the CAD model of the LowRider let me wrap the mount around the X-Rails with no interference.
Another change I made was a result of my MPCNC build.
NO PHILLIPS SCREWS!
Their use in the MPCNC is exactly the right design decision as they help limit applied torque and can keep you from cracking a print. I hate them though so I decided to go all black oxide socket head cap screws.
Another user pointed out that they can foul the Y belt on the Y motor mount so I recessed two of them a little to give clearance
Its amazing what a difference a “correctly” calibrated 3d printer makes. This assembly is going so much smoother than it did for my MPCNC. Parts are almost snapping into place
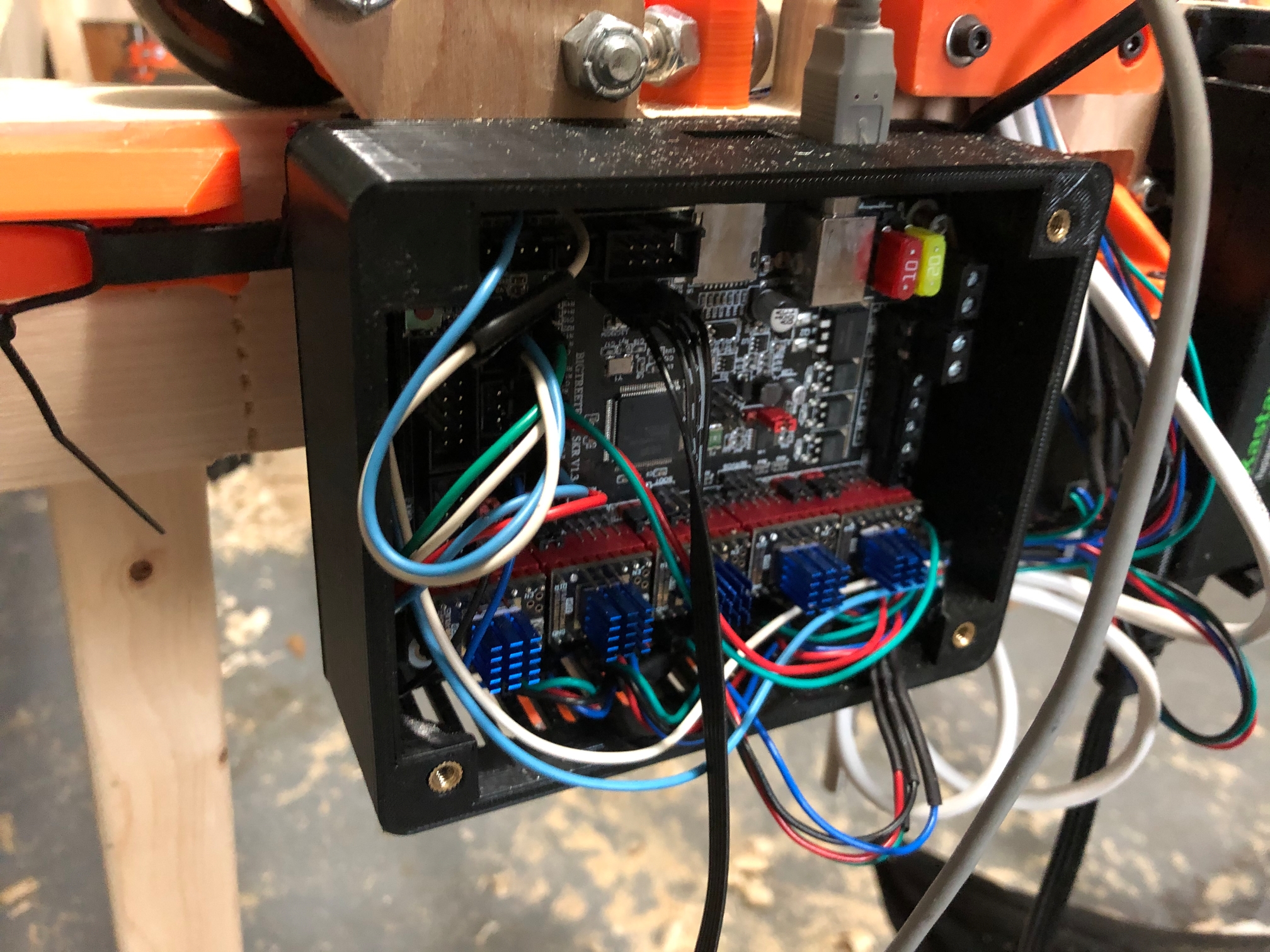
Something that isnt going very smoothly at all is the electronics. I was wooed by the flighty temptress that is 32 bit (because one time out of the 100+ jobs ive done on my MPCNC I had some buffer stuttering  ) and ended up going with a BigTreeTech SKR1.3 board with Trinamic2208 and a TFT35v2.0 screen as ive never been a fan of the regular Marlin clicky wheel navigation.
) and ended up going with a BigTreeTech SKR1.3 board with Trinamic2208 and a TFT35v2.0 screen as ive never been a fan of the regular Marlin clicky wheel navigation.
HOOOOOO MAN what a PAIN. Its not an issue of not enough documentation its an issue of WAY WAY too much poorly maintained conflicting garbage. The firmware on their github straight up doesn’t work. As a result ive configured Marlin 2.0 from scratch and im proud to say I have it working quite well at the moment.
That picture is the result of literally dozens of hours of watching tutorials and reading blog posts. Overall at this point I would NOT recommend the Big Tree Tech boards.
Something big ive found that’s at least news to me is that Marlin now accepts EXTRUDERS=0 as a valid configuration and allows E0 to be used as a second axis motor driver with no problems. So no more need to mess with the pins and do the E0 → E1 → E2 pin shuffle thing to get the dual axis dual motor configuration working.
Running zero extruders makes the TFT35 get a little angry and I had to dig around and comment out all mentions of M221 to get an error to go away and if i bring up any of the extruder related menus it panics about not having any to modify. This hopefully wont be a problem for long because…
At the moment im attempting to learn how to modify the TFT35 menus to make it much more relevant to CNC work rather than 3D-Printing. So far ive added different movement increments because jogging down a 3048mm table 10mm at a time wasn’t exactly going to cut it. Im going to try to implement switching of work coordinate systems G55-59 as well as being able to zero these independently. Having at least another work coordinate system would be nice, and I figure if i can implement switching to one adding the others wouldn’t be much harder. Whether I can actually figure this out is up in the air, my C is pretty rusty.
Thats pretty much it for now. Im nesting the pieces of the table to see how much stock I need and I can start actual assembly. I have an idea for using the LowRider to build its own table but well see if that happens.
I hope everyone out there is healthy and safe.
-Adam