I was about to ask a similar question, but I bought the kit.
The kit has these motors in them, right? http://www.automationtechnologiesinc.com/products-page/3d-printer/nema17-stepper-motor-kl17h247-150-4a-for-3d-printer
Those are 4.2V and 1.5A, so using your equations above, I would get:
4.2x1.5=6.3W
6.3W/12V=0.525A
So for X, Y, it should be set to 1.05V, and for Z, 0.525V
I understand the power equations, but then why do you take the input current, in Amps, and use that for the reference voltage?
From the data sheet (https://www.pololu.com/file/download/drv8825.pdf?file_id=0J590 pg 12) it shows:
Ichop = Vref / (5*Rsense)
Pololu uses a 0.100ohm Rsense, so I see where they got their equation.
But, I went ahead and tested it. I put the Y driver in 1 Step mode, and connected an ammeter in series with one of the coils, powered it up, used the LCD to command some Y motion, and then stop. I got 0.65A, which, because it’s in single step mode, and there’s some loss is probably closer to a limit of 1A, and the Vref was set to 0.7V. Is it possible the drivers in the kit have a 0.140 Ohm, or similar Rsense?
I don’t know if you tune the drivers before you ship, but it looks like you did, because I had X, Y: 0.7V and Z: 0.49V.
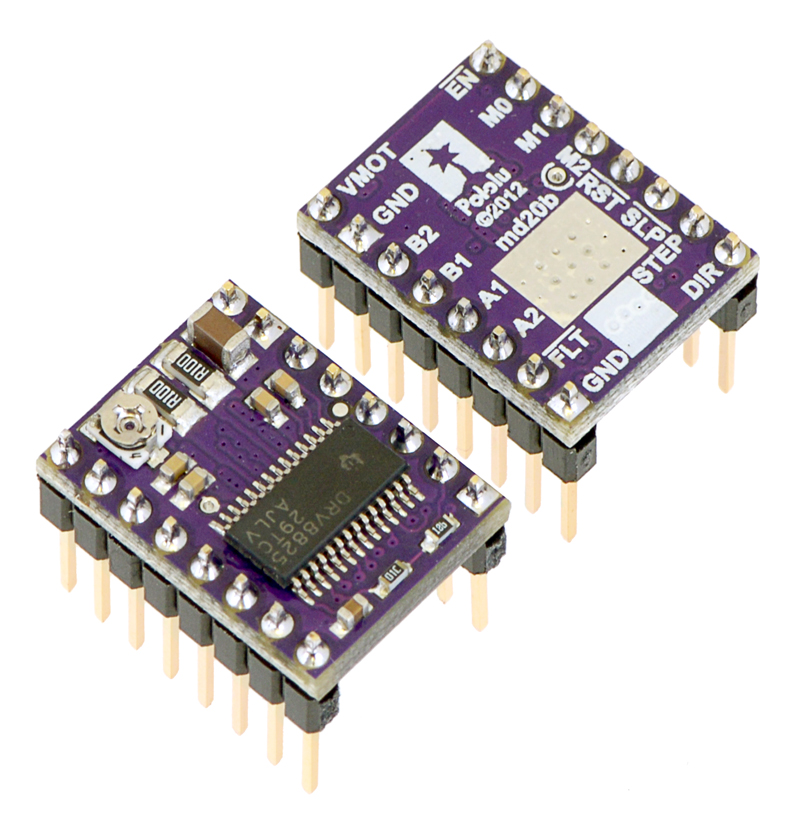
 . The formula for calculating the current limit on a Pololu DRV8825 driver is “Current limit= VRef x 2”.
. The formula for calculating the current limit on a Pololu DRV8825 driver is “Current limit= VRef x 2”.