Forgive me for being daft, but I have looked everywhere for a clear explanation of this. I wish there were pics of the wiring to the Rambo board of a completed project. I am trying to hook up these steppers and endstops but seems quite confusing . The X direction on the lowrider only has one stepper motor, and the Z axis has two. Yet, the boards are always marked with X0, X1 and a single Z on the board. Do you connect the z stepper motors to the x0,x1 and the single stepper motor of X travel to the Z pins?
Thank you in advance, had it working without endstops and reflashed with dual endstops. Really, simply want to get autoleveling with the Z axis as one side is always a little higher than the other. When I power down the gantry moves to the bed.
The Low Rider needs a change in the firmware to configure it to swap the second Y with a second Z. I don’t think Ryan flashes dual endstops in the LR configuration. @vicious1 can correct me if I’m wrong.
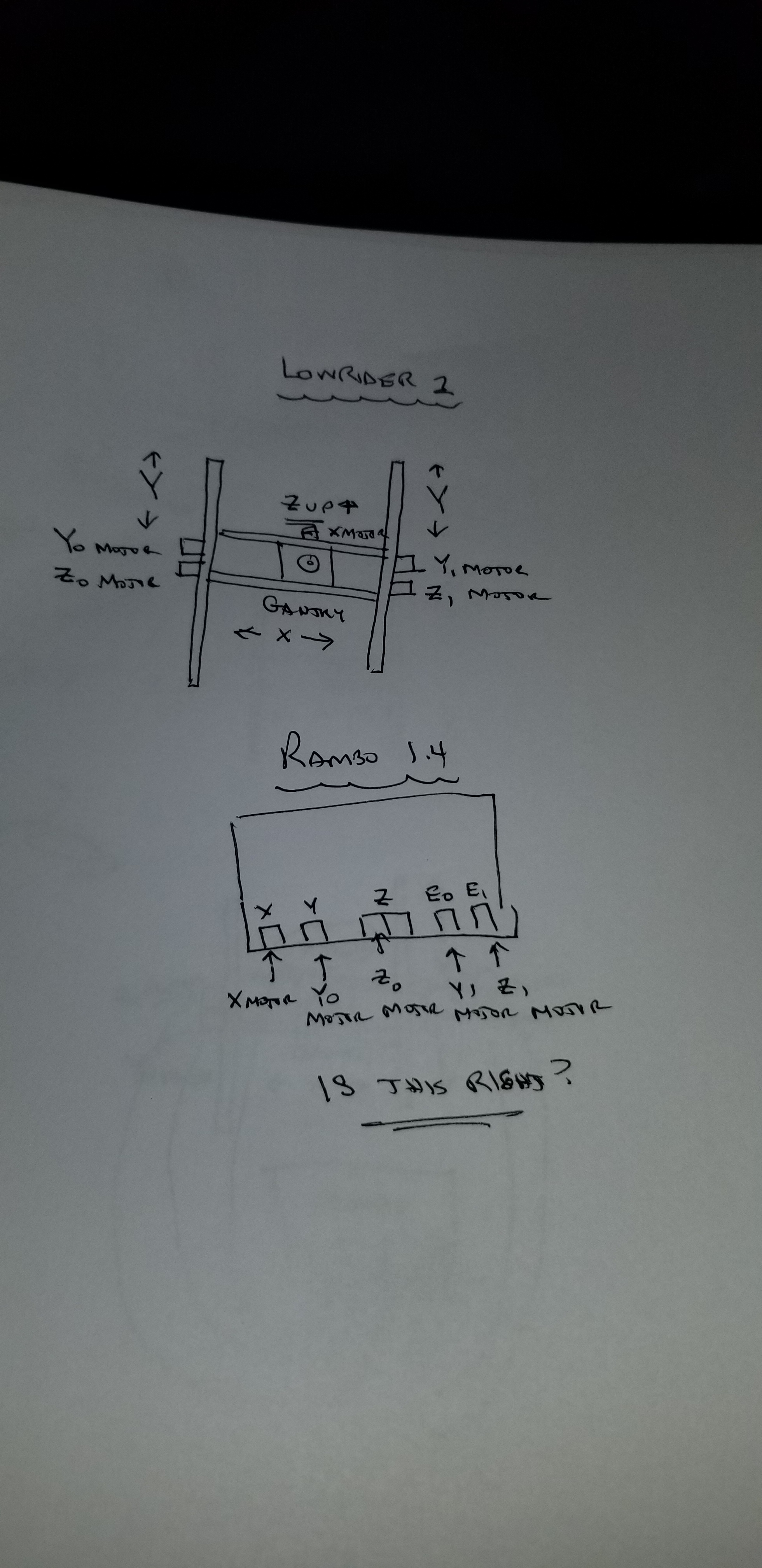
But if you did have the right firmware, X1 is in the port labelled X. Y in Y. Z1 in Z. X2 in E0 and Z2 in E1.
If you have an MPCNC, then it it would be X1, Y1, Z, X2, Y2. We onky ever use one of the Z ports. Those are actually the same and wired in parallel (which is inferior to series).
The Low Rider has 2xX, 1xY, 2xZ motors. If you rotate the table, and not your coordinates, then you can have 2xY and 1xX. I thought Ryan’s nomenclature was to have 2xX though…
OK, starting to get it. I built a Lowrider2 4x4 ft. X axis with the gantry (only one motor). Will have one endstop on X, Y0,Y1 endstops for autosquaring, Z0, Z1 endstops for autolevelling
Hi there!
I’m building the lowrider2 with a Rambo1.4 and using the V1CNC_Rambo_Dual firmware. My problem is that E0 is used for X1 and E1 for Y1. So how do I have to change the pins to get it working?
That was easy!
Thank you for responding so quickly. I don’t know where to give you guys feedback so thanks for offering these builds and maintaining the website. Without you I weren’t be able to build or afford a cnc.
1 of the z motors do not go down when using the z probe that came from V1 . one of the motors are in the y plug and you helped me get that working so no more not going up thanks @jeffeb3 for the help maybe , hopefully you can help e with this