I don’t think the height of the bearing is too important. Lower has a chance to be stiffer, maybe, so I put it as low as possible because why not. But a higher pivot is fine too. The type of bearing is going to be more important than the location, to maintain stiffness.
The point on the servo is that the load is much higher when close to the pivot. I don’t know the strength of the servo you have, but I suspect it may require careful design, whereas farther from the pivot the loads are lower and the design is easier.
In this illustration I’m imagining purple air cylinders or maybe hydraulic cylinders. The one near the pivot will need a lot of strength whereas the one far away need not be so strong. In your rendering it looks like the servo will need to support maybe 4 or 5 times the axial load of the router. It is doable but you might be making life hard for yourself unnecessarily.
OK I understand … note: I have several sail boat servos. 1 pushing a torque of 20kg & then the other is a constant rotatational servo (for pulleys) it has a torque load of 11kg. I have a roll pin as well.
I’m wonderign what sort of a pneumatic actuator would be small enough and light enough to sit aboard the router plate ?
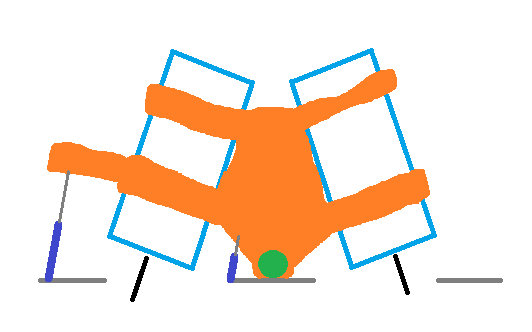
How about this (above image) … The bit would sit at the same position as the last bit’s pass (but then the slave router sits high exposing the bit - DANGER ! but it does make access to swap bits easier.
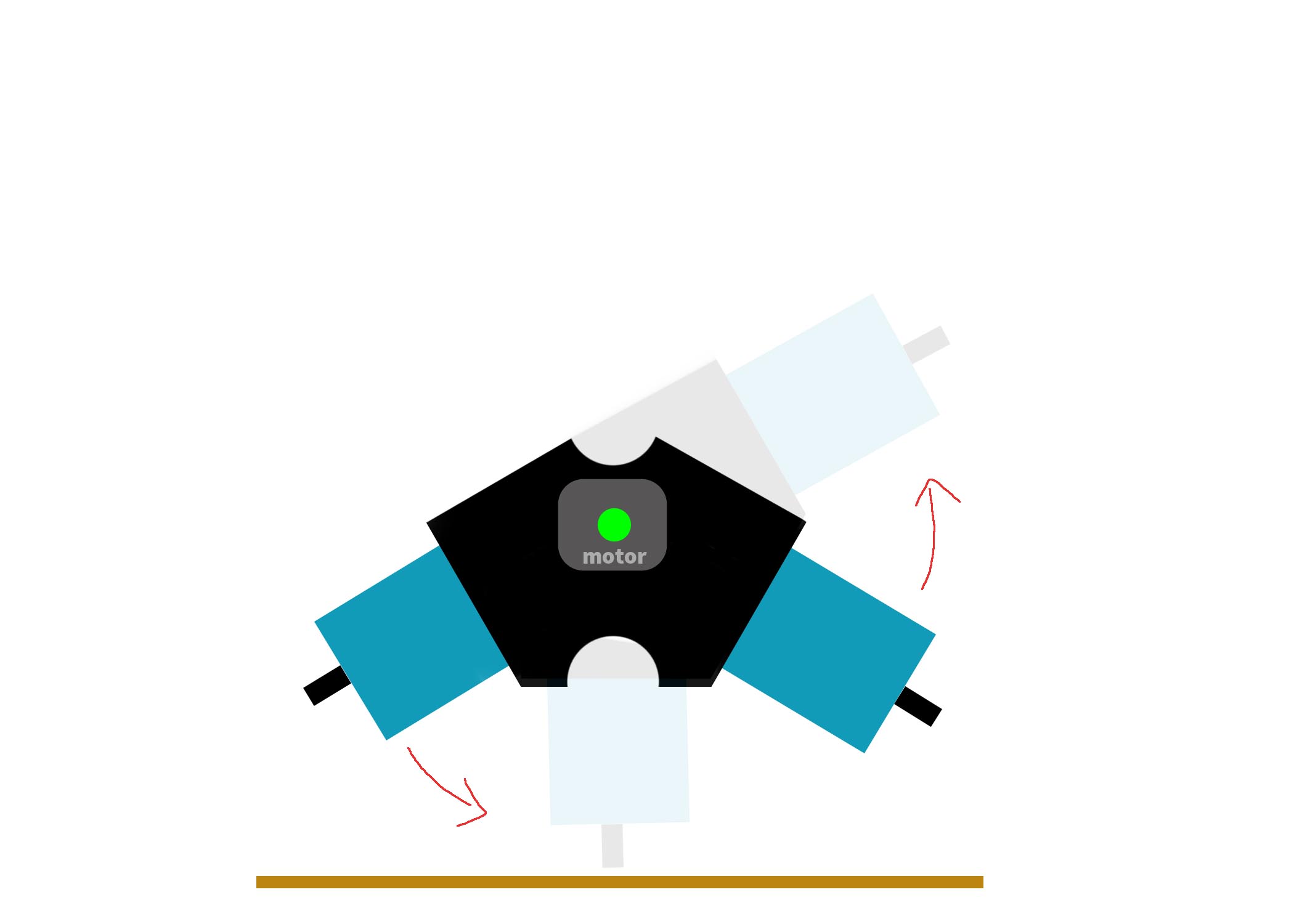
NOTE: The green circle would be a Nema17s drive shaft. How much torque is required to rotate 2 x makita routers ?? I’m also not sure if it would stay in place… might have to use a servo to push a locking pin into place once router is rotated into position.
I’m a little confused as to the purpose of this, but we have machines in our plant that route and drill. They are both on the same z axis with the drill motor mounted in front of the router spindle. The drill motor is on linear slides and moves up and down with pneumatic cylinders (small bimba type). When the drill is up, it is higher than router bit. When drill motor is down, the z position is offset by the distance of the drill bit, so which is now lower than the router bit. The drill can perform it’s job without the router bit cutting in. The x position also is offset by the distance between router bit and drill bit. Not sure if this makes sense, but it works in our high production shop.