Buenas tardes, espero se encuentren bien, y un saludo coordial, mi problema viene directamente con las ramps, y con la configuracion del marlin, estoy usando drivers A4988 y los motores que se venden en la web, eh calibrado para que sean pasos completos, pero cuando voy a usar repetier host y pongo que avance de 10mm o incluso de 50, nomás se escucha el motor, pero no hace ningun movimiento, solamente cuando pongo de 0.1 en 0.1, si mal no eh calculado, eh puesto un voltaje de 0.84V, segun el datasheet, los motores son de 1.5, realmente no sé que más hacer, y sigo teniendo el mismo problema, o ¿Acaso tengo que usar 1/16?, espero puedan ayudarme, muchas gracias!!
Did you remember to set the jumpers under the drivers?
A4988 are 1/16 with all three jumpers in.
1 Like
So the marlin system and the mpcnc, are they designed to be used as 1/16 on the ramps? I was using full steps (Without jumpers), so I use 1/16 with the 3 jumpers ?, because if so, according to the calculations, the Vref gives me 1.2, is it correct?
the ramps have an r100, and the motors they sell on their website, the datasheet says 1.5A
You need all three jumpers under the drivers. The firmware at marlinbuilder releases for the ramps is configured for drv8825s, which max at 1/32 microsteps. So you need to change the steps per mm to 100,100,400.
1.2V is the max, but things will hear up too much at that level. Start with 0.7A and you can raise it as long as you have a fan on the ramps and your motors stay under about 50C.
Your main problem sounds like missing jumpers though, then you will get double sized movements until you fix the steps.
1 Like
pero entonces, cual sería mi voltaje para mis a4988? compré los motores directamente en la web de V1engineering, según el datasheet dice que son de 1.5A por fase, entonces ya estoy un poco perdido, y en base a esos datos, que voltaje necesito entonces, si coloco los 3 jumpers por debajo de cada motor?
The voltage and the jumpers are two separate issues.
- Set the voltage to 0.7V
- Install all 3 jumpers.
Efectivamente, ya los motores se desplazan correctamente, lo que me sucede ahora, es que si pongo un desplazamiento de 50, me recorre el doble por así decirlo, 100, en el marlin cambie la configuracion steps_per_unit a 100,100,400,200 (lo de los extrusores quedó igual, no creo que afecte), cual podrá ser mi problema ahora?
Cut them in half. 50, 50, 200
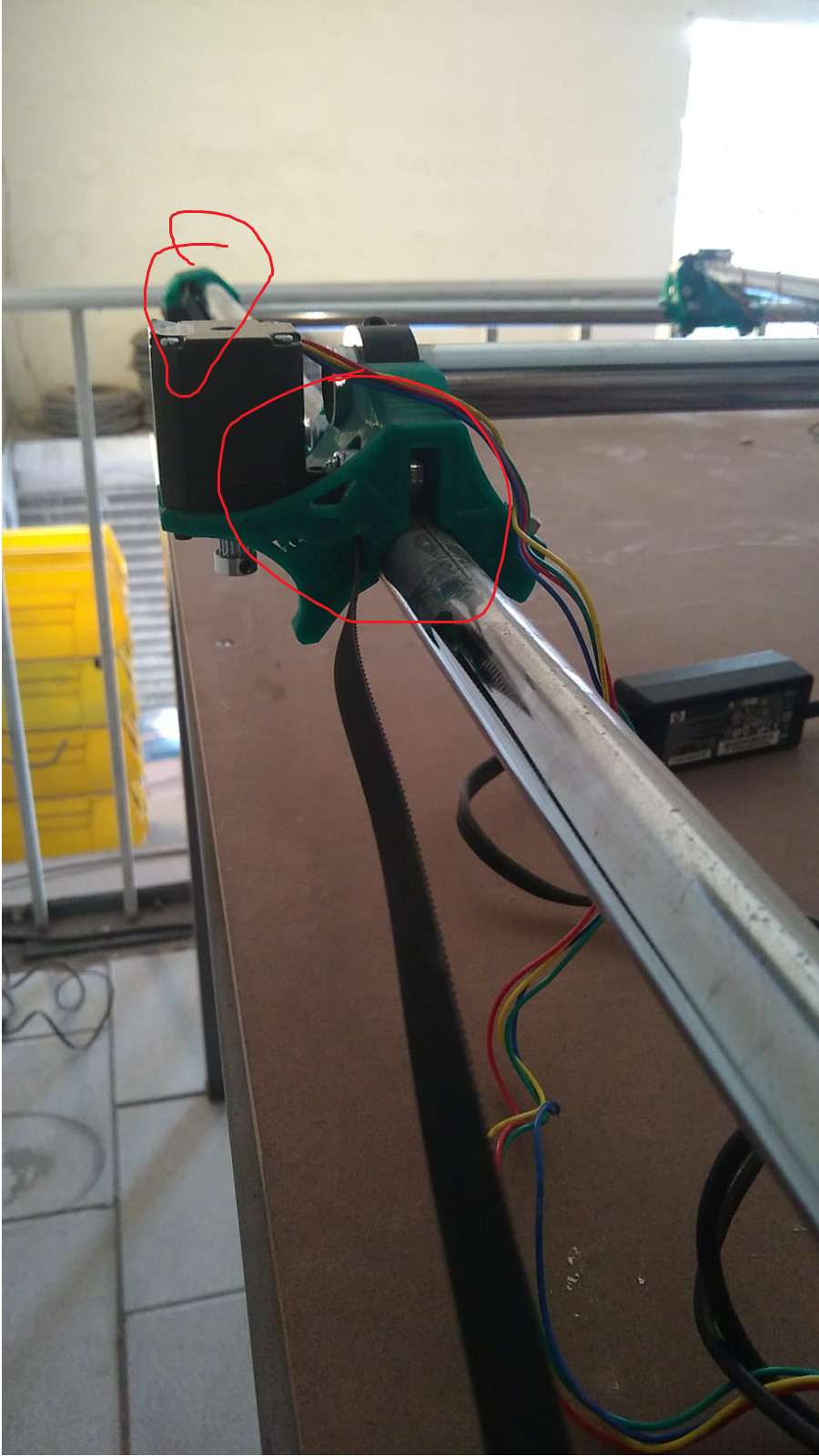
Le agradezco la ayuda, al parecer solamente es lo unico faltante, solamente una ultima pregunta, estoy poniendo la ultima correa, pero noto un desnivel, en la parte (fotos), siendo que en las demás no tuve ese inconveniente, y noto un pequeño desfase en las alturas
I’m not seeing any issues?
Las alturas, cuando pones el tensor, y luego la banda pasa por el motor, hay una pequeña diferencia de alturas
Maybe the belt is not lining up?
About the steps per mm. You need to change them on the running system. Not just in the configuration.h.
This gcode should work:
M92 X100 Y100 Z400
M500
Or, you can use the screen.
Hard to tell from this angle, maybe the tension block is upside down? Belt is just in a bit crooked? I am not sure how it could be off any other way.
1 Like
Pues de hecho ya lo cambie desde configuracion.h, pero sigo teniendo el mismo problema? como puedo checar eso? estoy usando repetierhost
Use the lcd and navigate to initialize eeprom. That should clear, reset, and save any old settings.
1 Like
Sorry, but i don’t have LCD, i use the arduino with the usb, i upload the marlin with the modifications, but the result is the same 50 mm = 100mm
You can run M502 and then M500 instead, in repetier or whatever you use to control it.
Solamente corro esos codigos en repetier? o que más tengo que hacer aparte de eso?