I built a machine 3 years ago using a rambo 1.4 control board. I have a Dual end stop machine. At the time it was very easy to download the firmware using the arduino software I am very familiar with. I damaged my original board and have replaced it with a new one. I uploaded what I thought was the correct firmware but am still experiencing that only on the the x and one of the y steppers are engaging. I am assuming that this is the firmware for the series wiring option. Can someone tell me where I can find the correct firmware for the dual endstop model. There is no problem with the wiring because when I put the old board back in the motors work fine.
You will find links to the various versions of the firmware on this page. You are looking for V1CNC_Rambo_Dual. Note that the firmware no longer compiles with the Arduino IDE, so you need to either directly load firmware.bin from the zip file using XLoader, or use Platform.IO to compile and upload from the source files.
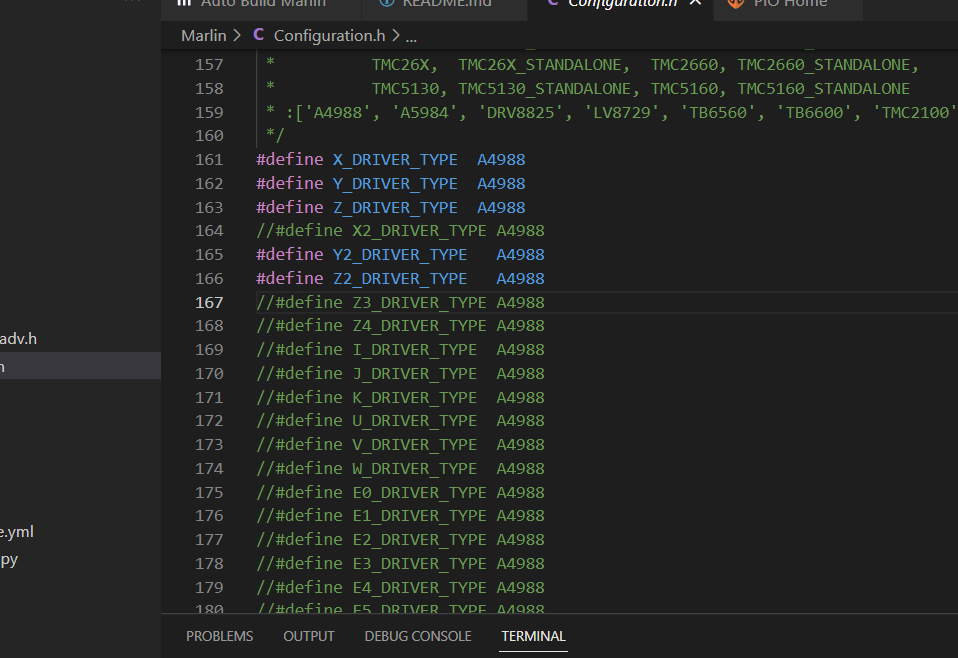
Okay apparently I had done this correctly. The board was still not moving the second x axis and the y2 motor is moving but where the x1 motor should be connected. I reviewed the config file and found this.
I then connected a motor to the last pin (that should have been y2) and moved the Z axis and Bingo the motor moved. Do you think this is a bug in the config?
The firmware is solid. I recently upgraded my machine to the latest version, and it works correctly. Here is a link to a wiring diagram for dual endstops for the Rambo board. Note that there are two Z sockets, but you only use one. These two Z sockets are wired in parallel and share one driver.
If your wiring is different than this diagram, send us a picture of your wired board and a more detailed description of how you have it wired, and I’m sure we can track down what is going on.
Edit, I just took a closer look at the config file you show in your picture. That appears to be the configuration file for a Lowrider, not an MPCNC (Burly or Primo). If you have a Lowrider, I linked you to the wrong firmware. If you don’t have a Lowrider, you need to fix the defines in your configuration.h or just use the binary.
Edit 2: Here is how the configuration.h file reads for the Rambo MPCNC dual version of the firmware:
Thank you Robert. I have a primo . I made the changes prior to you post and the maching is working correctly now. Thank you for your help with this issue!
{kind=link}