I just burned up one of my TMC2209’s because I set the Vref to an incorrect value. The issue I’m having is that my multimeter is displaying a value way out of the possible domain. It displays a voltage of between 9.5 V and 11.5 V. I have tried my other multimeter with the same result and I can’t seem to find anyone having the same issue.
Does anyone have an idea of what is happening here? Note that I have run some G-code (without router) with no issues other than a high pitched sound which is caused too much amperage I believe.
You shouldn’t need to adjust them if they are speaking uart. They should just get set by the software. It will print the current current setting if you send M122.
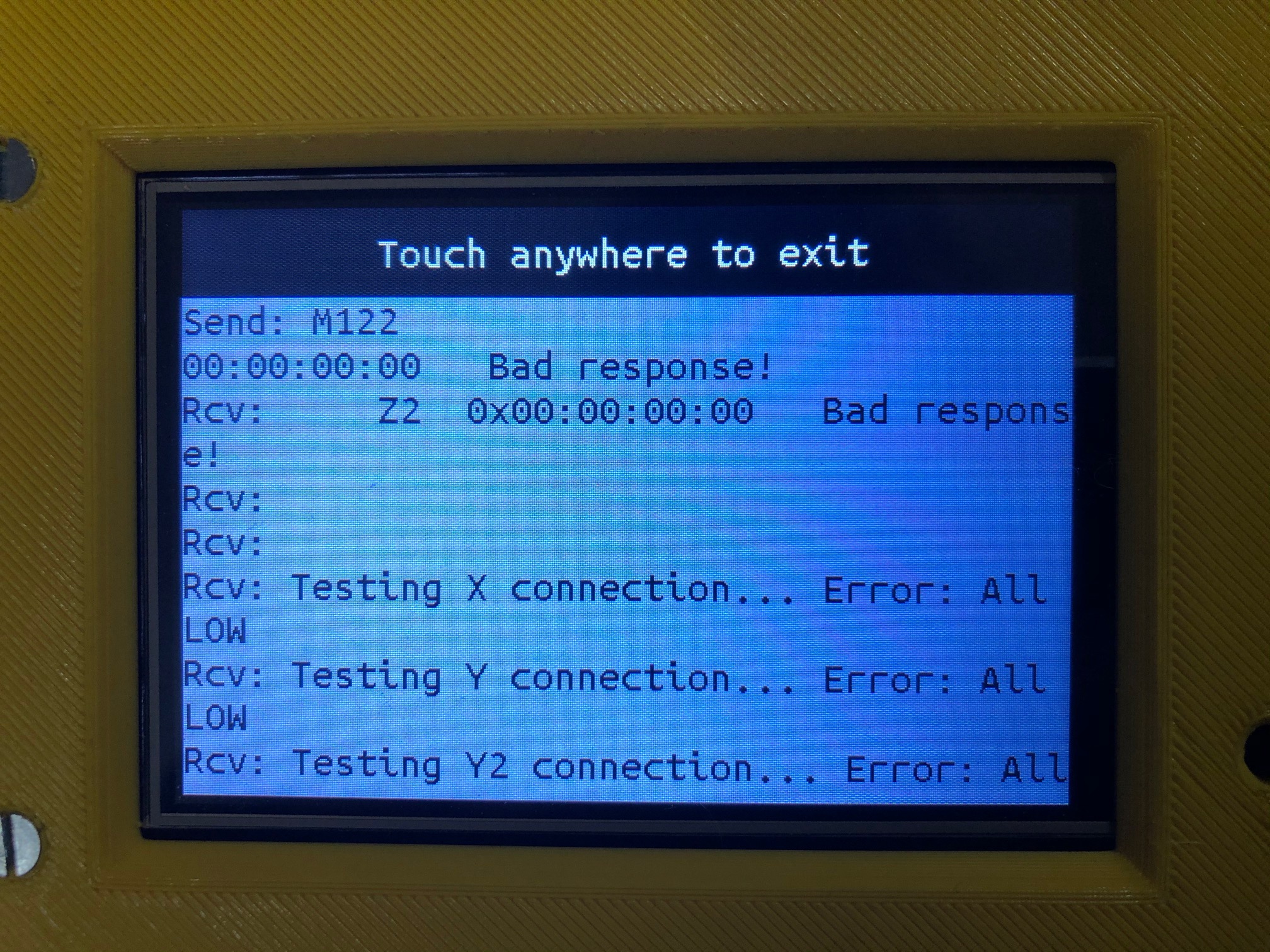
Thank you for the reply. I tried sending the M122 command and my board made all sorts of beeping sounds while displaying “ALL LOW”. I did not connect the steppers because I am afraid that I will damage them, could this be the problem? I came across some current settings in the configuration.h file and I wonder if these are the values you are talking about. Thank you for your involvement in this project and helping me.
I’ve poked around with how TMC drivers work in consideration of a future project, but I don’t have any practical knowledge. These drivers can either be setup in ‘legacy’ mode, where the current is set through a pot, or they can be set from the firmware using UART. All setups I’ve seen on the forum set the current in the firmware. I don’t know what needs to be changed/checked to go between the two modes. As for the firmware, I think the current for the TMC drivers is in configuration_Adv.h in a section that starts with:
#if HAS_TRINAMIC_CONFIG
A typical part of that section looks like:
#if AXIS_IS_TMC(X)
#define X_CURRENT 800 // (mA) RMS current. Multiply by 1.414 for peak current.
#define X_CURRENT_HOME X_CURRENT // (mA) RMS current for sensorless homing
#define X_MICROSTEPS 16 // 0..256
#define X_RSENSE 0.11
#define X_CHAIN_POS -1 // <=0 : Not chained. 1 : MCU MOSI connected. 2 : Next in chain, ...
#endif
Edit: Is it possible the drivers are set in UART mode but the firmware is not talking to them leaving them in some “random” or default state?
All low is saying that at least one of the drivers isn’t connecting. If you can paste the response of M122 here, I can take a look.
The motors won’t be damaged. They are super strong. Just don’t disconnect the motors while the drivers are powered, that can break the drivers (but I haven’t seen that reported in ages, so maybe it is low risk).
when I try to home my x-axis and I read online this has to with the TEMP_SENSOR_BED. Does this problem go away if I change this value from 70 to 0 or is a resistor necessary?
Yeah, the output from M122 is really long, so you’d have to check from a computer to see the whole thing. But it looks like they aren’t talking at all.
There are some standalone TMC drivers, but I haven’t seen those in the 2209, which makes me think the jumpers might be wrong, or the drivers aren’t getting power. Can you post a pic of the Skr all wired up?