Here is a link that explains cloning the axis to the “A” driver output.
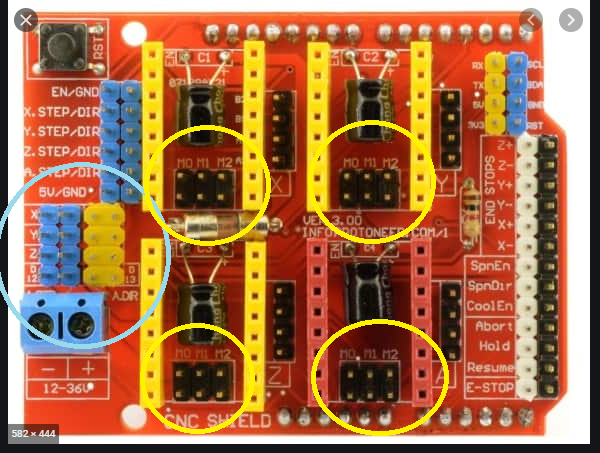
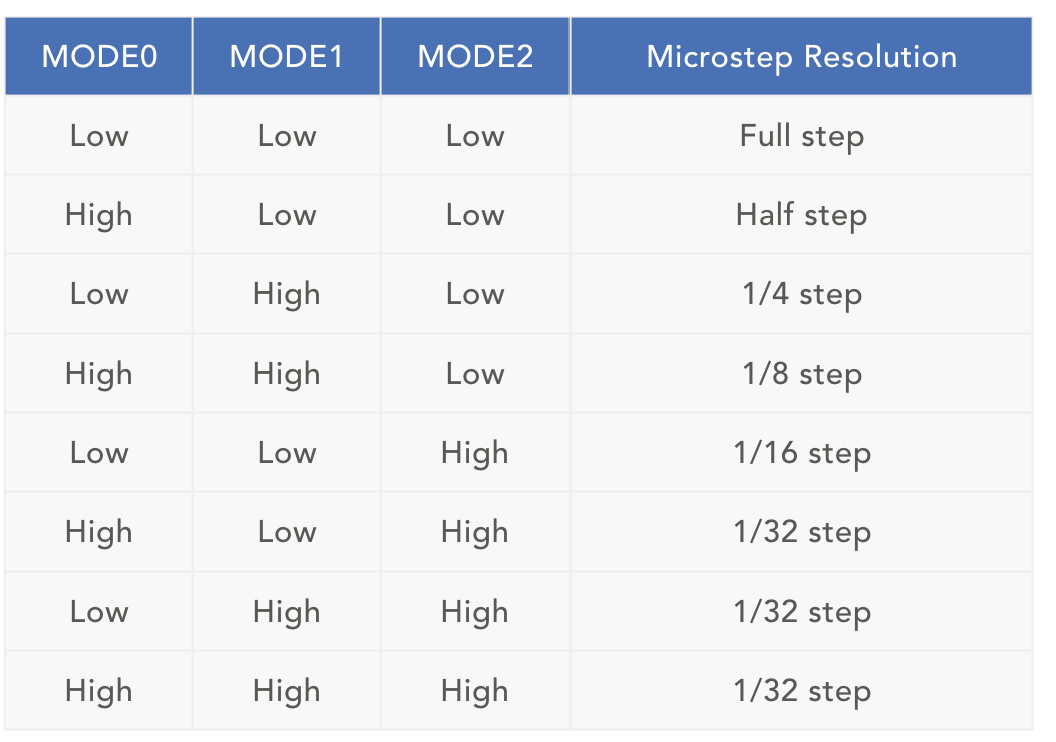
As for the M0, M1, and M2 jumpers those are set based on your motor driver microstepping, not the motor itself. If you are using A4988 drivers you would want a jumper closing all three for 1/16 microstepping. For DRV8825, you want just M0 and M2 jumpers for 1/32 microstepping.
I use this setup for my MPCNC, just without the axis cloning.
Edit: Here is a chart of jumper settings for the drv8825.
For this application, I wouldn’t use it. The documentation recommends wiring the dual motors in series so you wouldn’t clone any of the axes.
As for the 0.9 degree step angle, you will use that as a basis for calculating your steps/mm in you software. .9 degree step angle means 400 steps per revolution. Then, if you are using the DRV8825 at 1/32 microstepping that makes 12800 steps per revolution. If you are using all of the recommended hardware, 16 tooth pulleys at 2mm belt pitch, this translates to 400 steps/mm. The math is a little easier because the pulleys are 32mm/rev and the stepper drivers are 1/32 step.
Hi, I played with Mode 0 to 2 jump to test running the stepper motors and I understand how to use those mode jump setting.
I leave empty pins and I set full steps because my stepper motor’s degree is so smooth, if I set 1/32 steps and my stepper motor is 0.9 degree steps that is very very smooth that stepper motor wont running, just tiny variable I felt when I hold it.
My stepper running at full steps and it is bit smooth than 1.8 degree stepper motors, I have tested and I have four 0.9 stepper motor and one 1.8 steps stepper motors.
Thank you for help and explained how steps work and calculate math for steps Tim O @Strider_Matic