I could not get TT download to work so I found this file, skr13 marlin20bugfix_2208 changes. I had the connections on the board like TT, X moved ok but Y2 moved with it and Y moved ok but Z2 moved with it. I switched Y2 and Z2 around and Y and Y2 now move ok but X and Z2 now move together. Any ideas? I have been going crazy trying to figure this out.
Sounds like you have a two axis duel stepper firmware setup for Lowrider but trying to use that on an MPCNC. What configuration are you hoping to achieve?
Lowrider = dual Y dual Z single X
MPCNC = dual X dual Y single Z
Perhaps you might be better served by starting simple and only using 3 drivers and wiring any dual motor axis’ you have in series…once you have that under your belt you can experiment with dual drivers.
The teachingtech firmware quickly got out of date. I don’t think it compiles with the latest versions of the tmc library.
You can try mine. I used it for 2209s. I didn’t attach endstops, but I did run 5 drivers on my lowrider. I also think I got the tmc settings right for cnc:
Jeff is right, the later library versions do not work with TT’s firmware, you need TMCStepper-0.5.2
Are you using Visual Studio to compile? In the platformio.ini file, in the [common] section you will find TMCStepper@>=0.5.0,<1.0.0 you need to change that to TMCStepper@=0.5.2
You will also find the same line further down in the [env:LPC1768] or [env:LPC1769] section (depending on your SKR board version)…change that too.
Then go to the Platformio tab on the side of the screen (alien head) and find ‘clean’ and click on that - that will remove the existing TMCStepper lib from your build directories, then click on ‘Build’ and it should download the 0.5.2 library, you can follow what it is doing in the terminal window…make sure it uses the earlier version of the library and it should compile ok.
Thank you both for the info. I did install jeffeb3 files and they do work fine. I tried to fix my other file but I still get errors. the main one which I have been fighting is delete temp files and I can’t find how to do it. I will keep trying because I want to use the end stops. In the meantime I will continue learning with your working file.
Glad you got it working with Jeffs files. FYI if you get a message about the software being unable to delete stuff you should manually delete everything in the .pio directory and re-compile, it should then re-download the older libraries as specified in the changed platformio.ini file
Jeff when adjusting the axis x y or z instead of moving 10mm as shown on my display they move about 20mm, is that normal or do I need to adjust something? Also did the setup have a fan attached and where. I tried what I thought was the correct place to plug it in but nothing happened.
I can’t remember what fan settings I chose. Can you turn it on with M106?
It sounds like you have the wrong steps/mm. Can you change that with the LCD? It should be 100. If you have 200, then it will move twice as far trying to go the same distance. If it is already set to 100, then show us what hardware you’re using, because that is a little odd.
I did find the fan and its working. I could not find how or if I could change the steps on the LCD. I am using TT file for the LCD which seems to be fine. Using SKR v1.3 with TMC2208 UART steppers. Everything else came from V1. I did notice in the config file it is set to 100 steps/mm.
I haven’t messed with my tft35 that much. I have them both on my desk, but I keep getting distracted.
It is strange that it is already set to 100. Do you have a comouter connected that I can hand you some commands and you can paste what it says? Something like repetier host would work. Or cncjs.
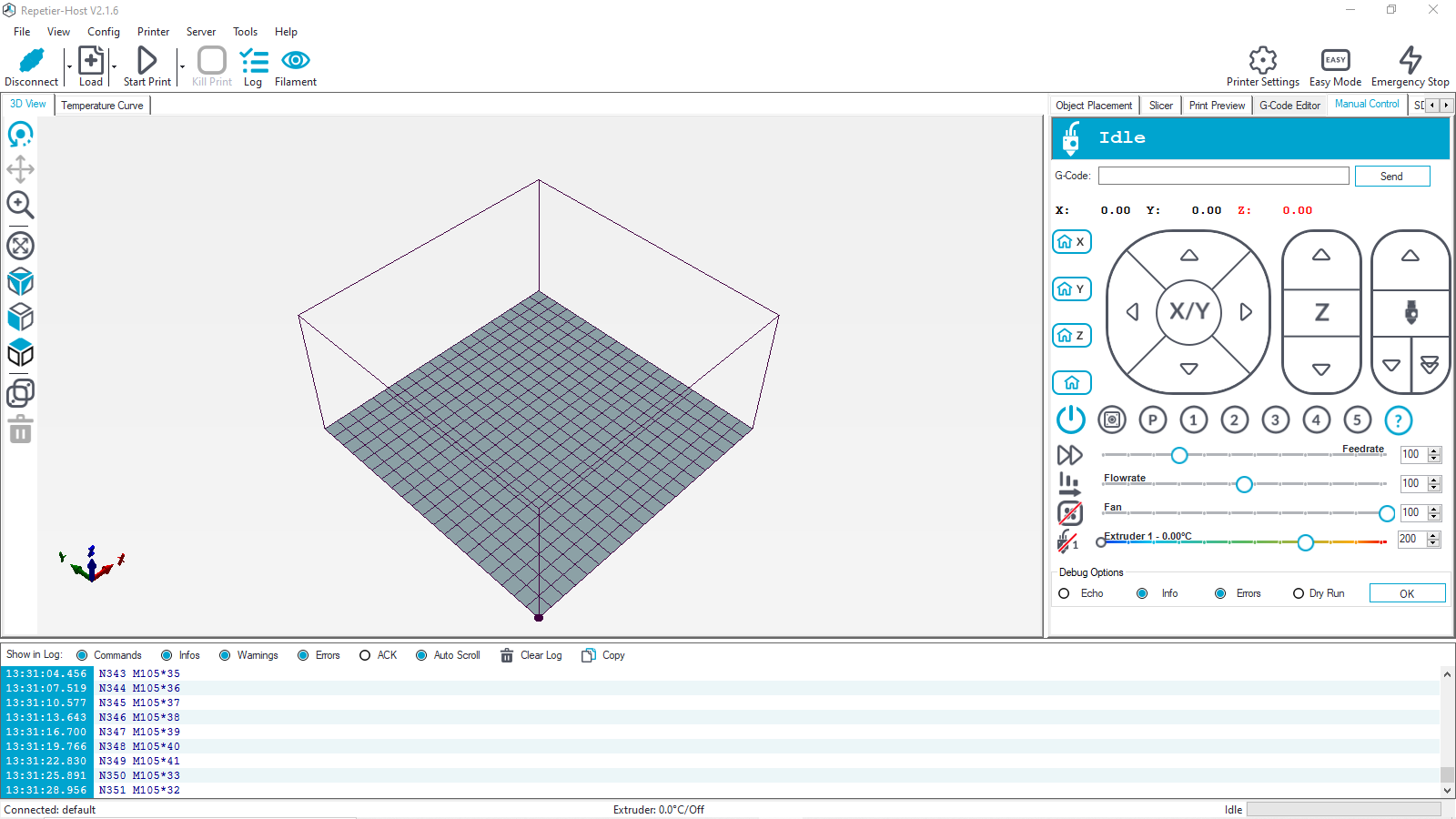
If you can connect it, there is a little input box to send commands. There is also a console log at the bottom that prints out what the Low rider is writing back. If you just connect it and then share a picture of the console, that would be a good start.
Yeah. The log are in the bottom will print back what Marlin responds with. In the upper left there is a box labeled “G-Code” with a send button. Send this and see what it reports:
M503
Make sure you capitalize the M. Scroll back until you see the line with the steps/mm. It should say M92 on it.