There was an issue around burning up TMC2209 stepper drivers. Now, there are ways to repair the board. Since then they have released a new version and have split them to rev_a (board with issue) and rev_b (fixed board). A quick google search can tell you which board revision you have.
In Marlin, we get two motherboard options BOARD_BTT_SKR_V2_0_REV_A and BOARD_BTT_SKR_V2_0_REV_B. Only difference between the two options is that marlin warns you about the issue with the stepper drivers when building the firmware.
So, I have took your advice and tried another machine with windows 10 and WSL.
Cloning the repository into WSL’s file system, I found that I had permission errors when trying to build (the same errors as before with macOS).
Then I tried cloning the repository to my Desktop (Windows file system), there was no permission errors. So I was able to continue.
I also noticed when cloning, the files all changed to ‘dos’ text file format. Which caused errors when running the scripts in WSL. I was able to fix this by removing all changes to my branch, another option is running dos2unix in the root of the repo.
Following the UBUNTU_BUILD.md file under the docs folder in the repository, I installed Python and the virtual environment successfully.
Cloned the Marlin repository.
Then ran the build steps for the V1CNC_Skr1p3_2209 successfully. Received the firmware.bin file.
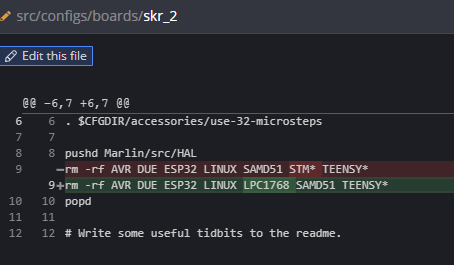
To configure the SKR2 board I created a new branch and applied changes. Here are the two files:
They were made by referencing both the skr pro board and skr 1.3 configurations, as well as the skr2 repository on the BTT github.
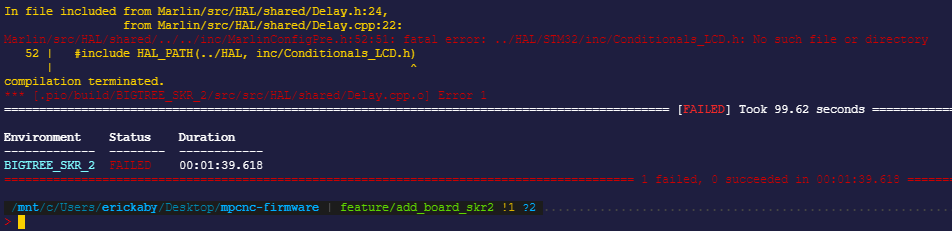
Compiling the SKR2 board config threw my error from before of ../HAL/STM32/inc/Conditionals_LCD.h: No such file or directory
So it seems, there is an issue either with my configuration or something specific to the board. Not too sure where to look from here, anywhere I should be looking to fix the issue?